

Cluster type obstacle synchronization method
An obstacle and cluster technology, which is applied to services based on a specific environment, traffic control systems for road vehicles, instruments, etc., can solve the problem of limited processing capacity of single-vehicle processing equipment, hazards of vehicles and other traffic facilities, and inability to process environmental perception information. and other problems, to achieve the effect of facilitating timely processing and delivery, reducing computational burden, and solving driving blind spots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
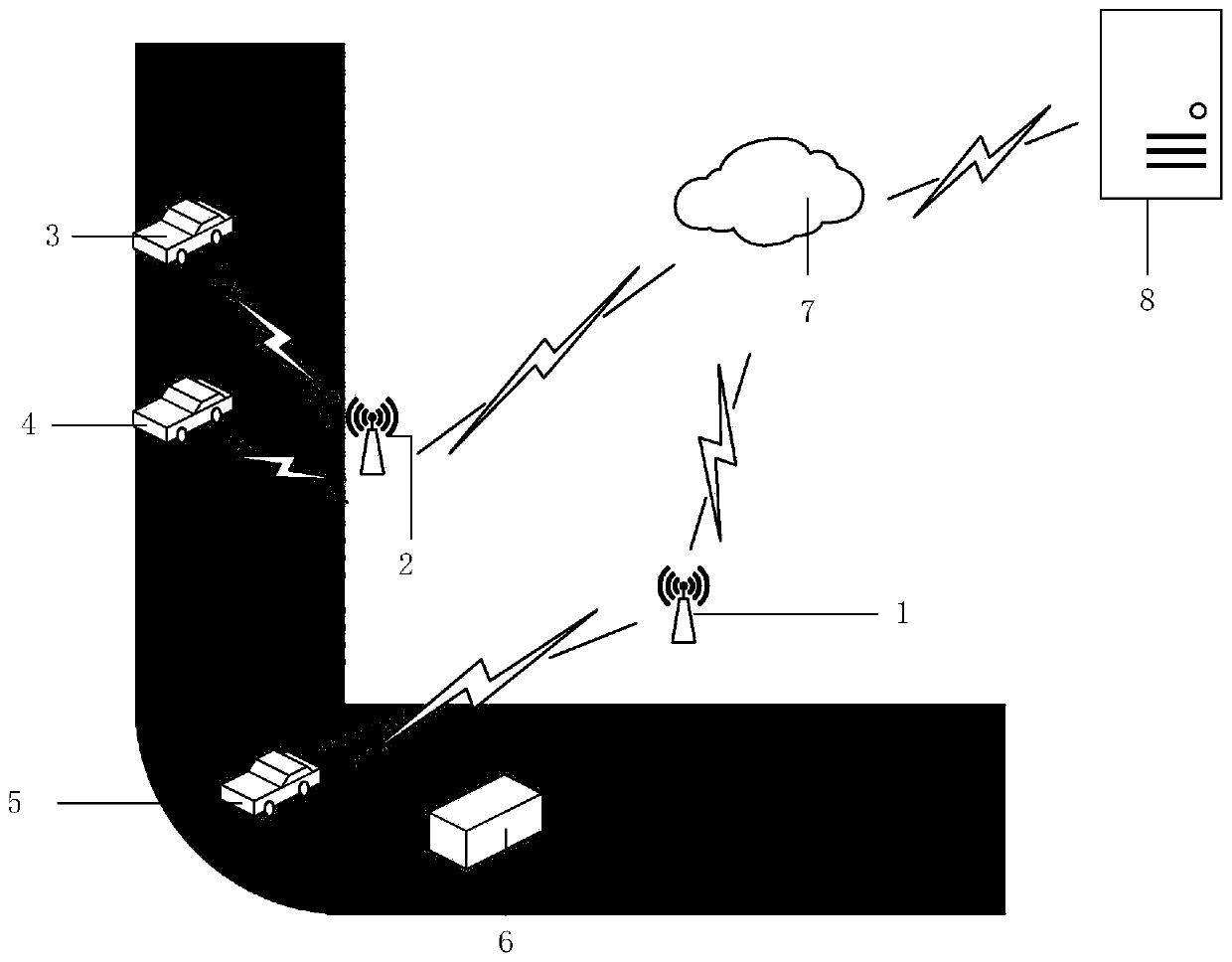
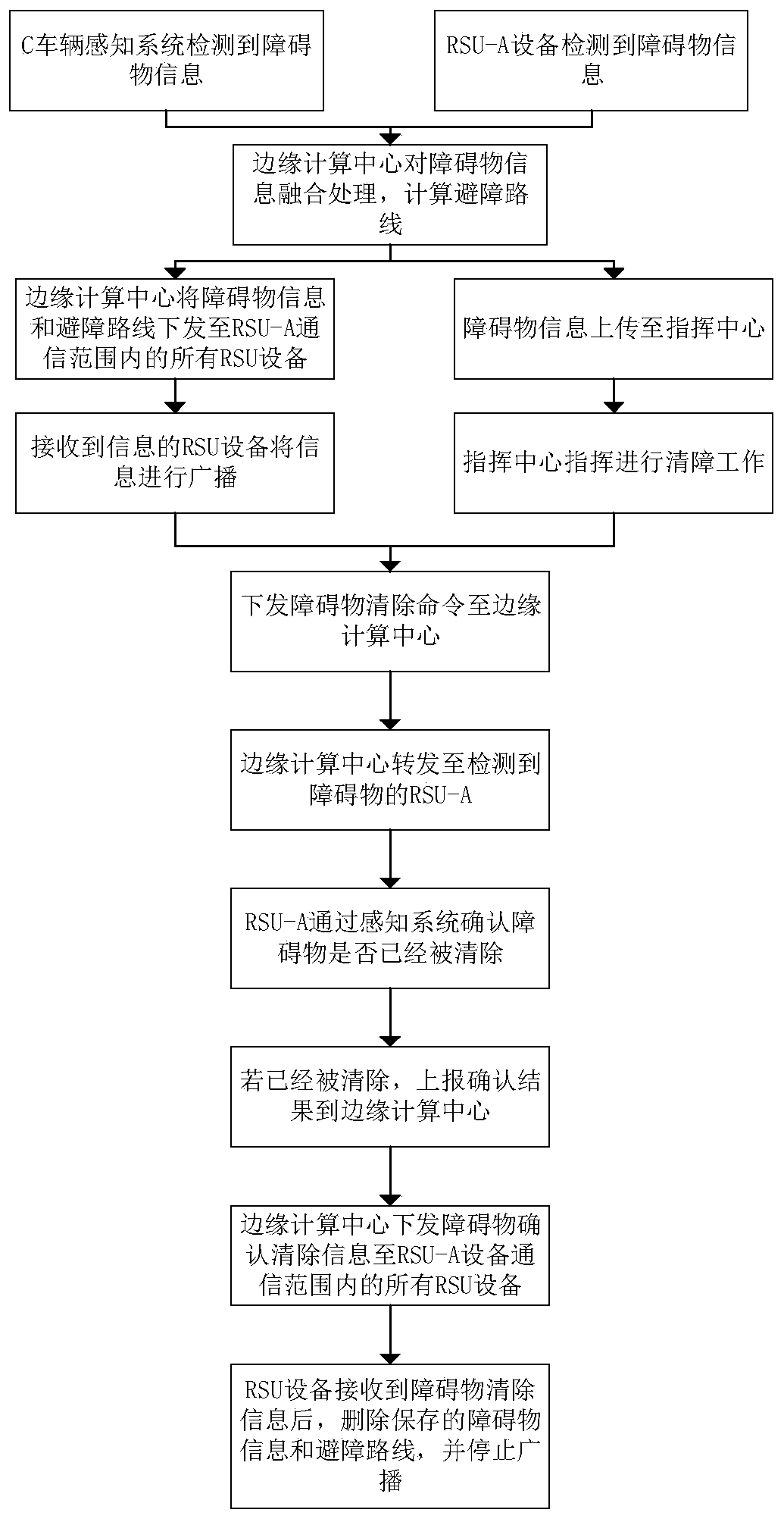
[0036] Such as figure 1 As shown, RSU-A device 1 and RSU-B device 2 are set on the road, A vehicle 3 and B vehicle 4 only have V2X communication capabilities, A vehicle 3 and B vehicle 4 are within the communication range of RSU-B device 2, The C vehicle 5 has environment awareness capability and V2X communication capability, and the C vehicle 5 is within the communication range of the RSU-A device 1 . It is assumed that an obstacle appears within the detection range of RSU-A device 1 and there is no obstacle within the detection range of RSU-B device 2 . A clustered obstacle synchronization method provided by Embodiment 1 of the present invention, such as figure 2 shown, including the following steps:
[0037] Step 1: The RSU-A device 1 detects the information of the obstacle 6 on the road through the perception system, and reports the information of the obstacle 6 to the edge computing center 7 through the mobile network; at the same time, the C vehicle 5 also perceives t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More