

Vertical take-off and landing unmanned aerial vehicle mobile platform landing guide device and guide method thereof
A mobile platform, vertical take-off and landing technology, applied in the directions of measurement devices, ground devices, navigation, etc., can solve the problems of insufficient GPS single-point positioning accuracy, radar navigation is easy to be detected and interfered, and achieve fast control response time and follow-up phase. Accurate and improve the effect of guidance accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
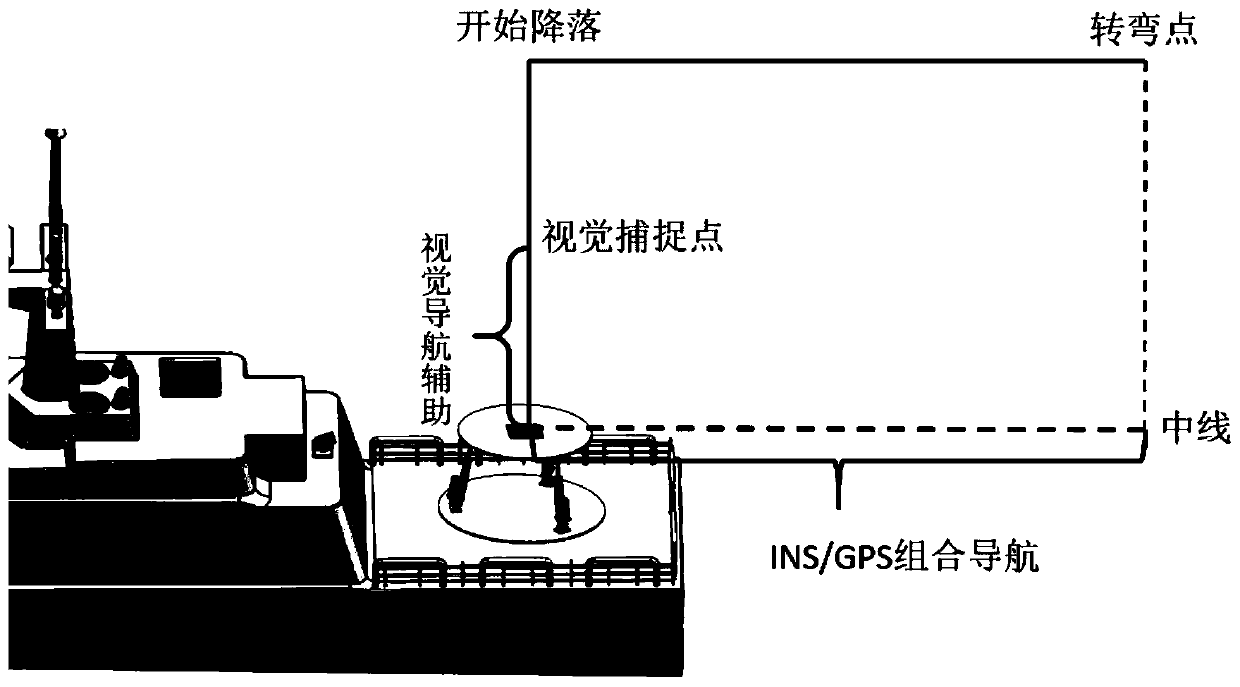
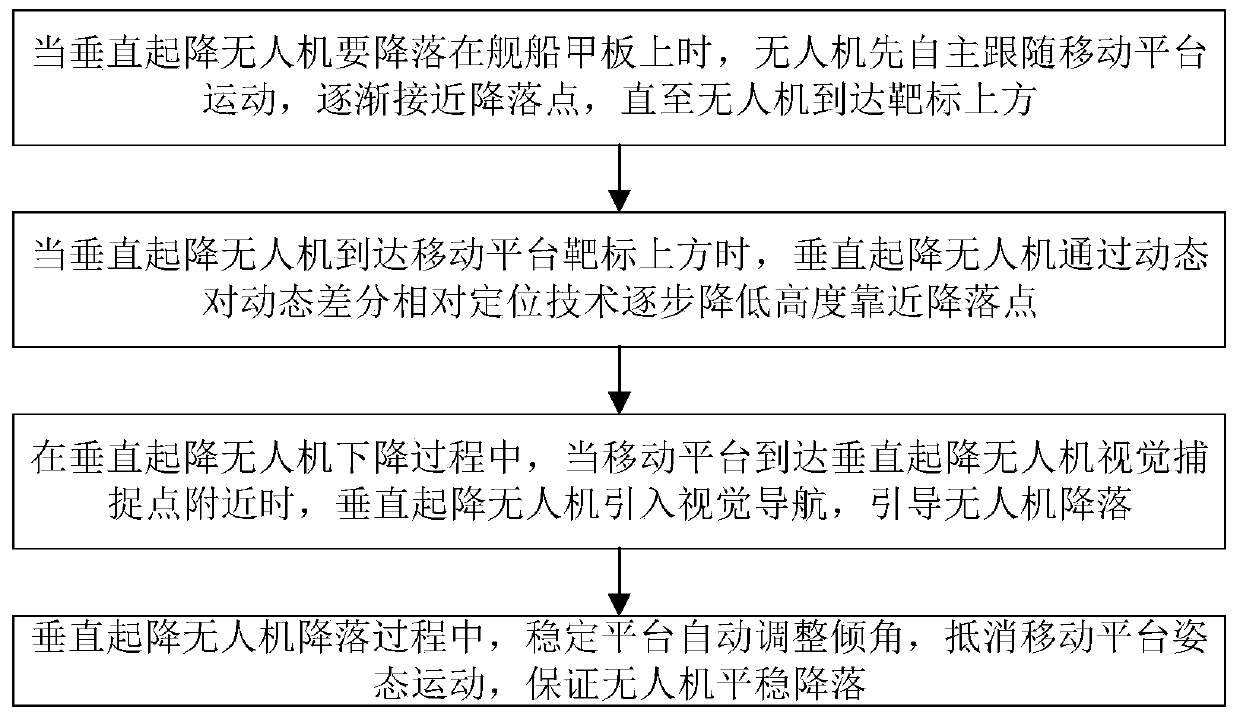
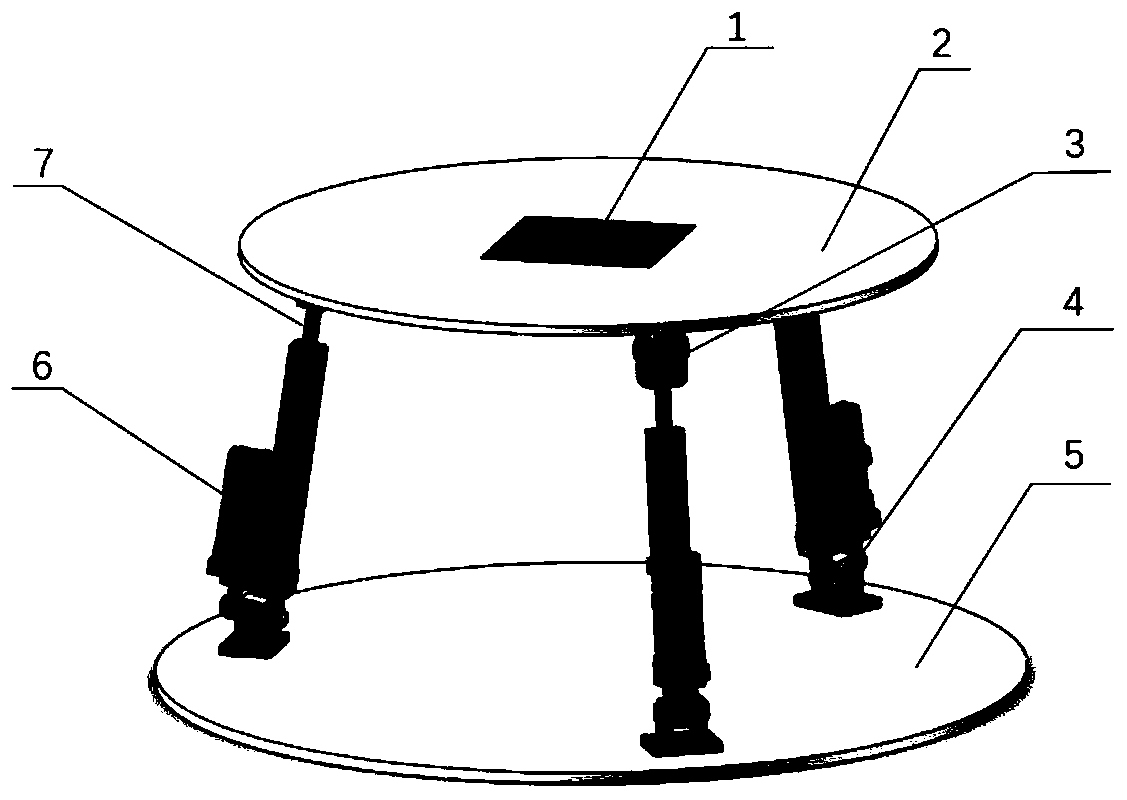
[0046] The present invention conducts research on vehicle-mounted or ship-borne vertical take-off and landing (Vertical Take-Off and Landing, VTOL) UAV precision landing technology, and designs a VTOL UAV landing guidance scheme, such as figure 1 As shown, the cumulative error of inertial navigation is reduced through the satellite navigation / inertial navigation integrated navigation method, and the dynamic-to-dynamic differential relative positioning technology is introduced to achieve high-precision relative positioning between two moving objects; and the image guidance method is introduced in the terminal guidance Assists in improving landing accuracy. In particular, the present invention designs the mobile platform for ship-borne vertical take-off and landing UAVs, and designs the platform to automatically adjust the inclination angle accor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More