

Four-rotor flying robot maneuvering formation control method for wireless speed measurement
A flying robot, speed measurement technology, applied in vehicle position/route/altitude control, non-electric variable control, control/regulation system and other directions, can solve the problems of formation control without linear speed distribution and difficult to control motion, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to enable those skilled in the art to better understand the technical solution of the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. And the features in the embodiments can be combined with each other.
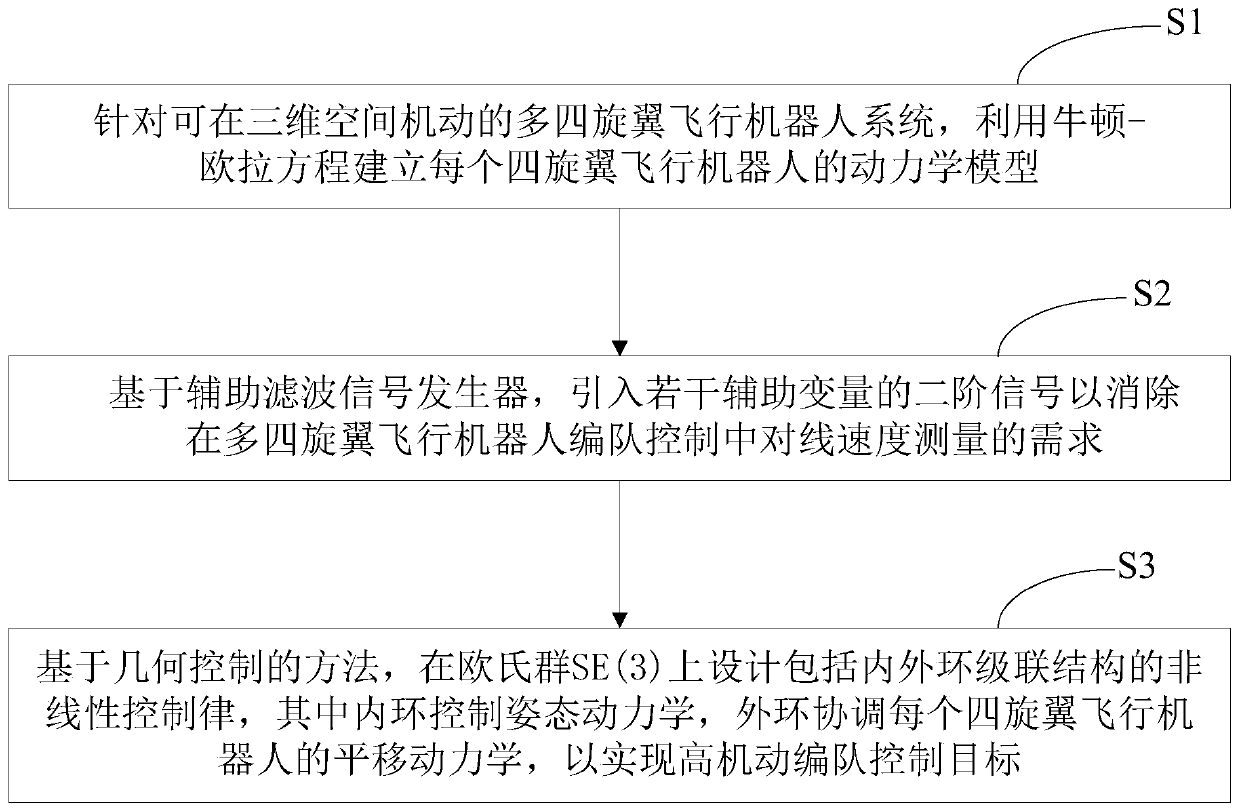
[0060] Such as Figure 1 to Figure 3 As shown, the embodiment of the present invention provides a four-rotor flying robot mobile formation control method for wireless speed measurement, including the following steps:
[0061] S1, for the multi-quadrotor flying robot system that can maneuver in three-dimensional space, use the Newton-Euler equation to establish the dynamic model of each quadrotor flying robot; preferably, in step S1, for the multi-quadrotor flying robot that can maneuver in three-dimensional space Flying robot system, the pose of each quadrotor flying robot is defined in the Euclidean group SE(3) space, wherein, in the inertial coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More