

Intelligent inspection robot
An intelligent inspection and robot technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of large errors in the angle and orientation of the collected images, the inability to accurately correspond to the positional relationship of inspection points or coordinate inspection data, and the inability to meet precise Requirements and other issues to achieve or reduce errors, accurately correspond to positional relationships, and avoid errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
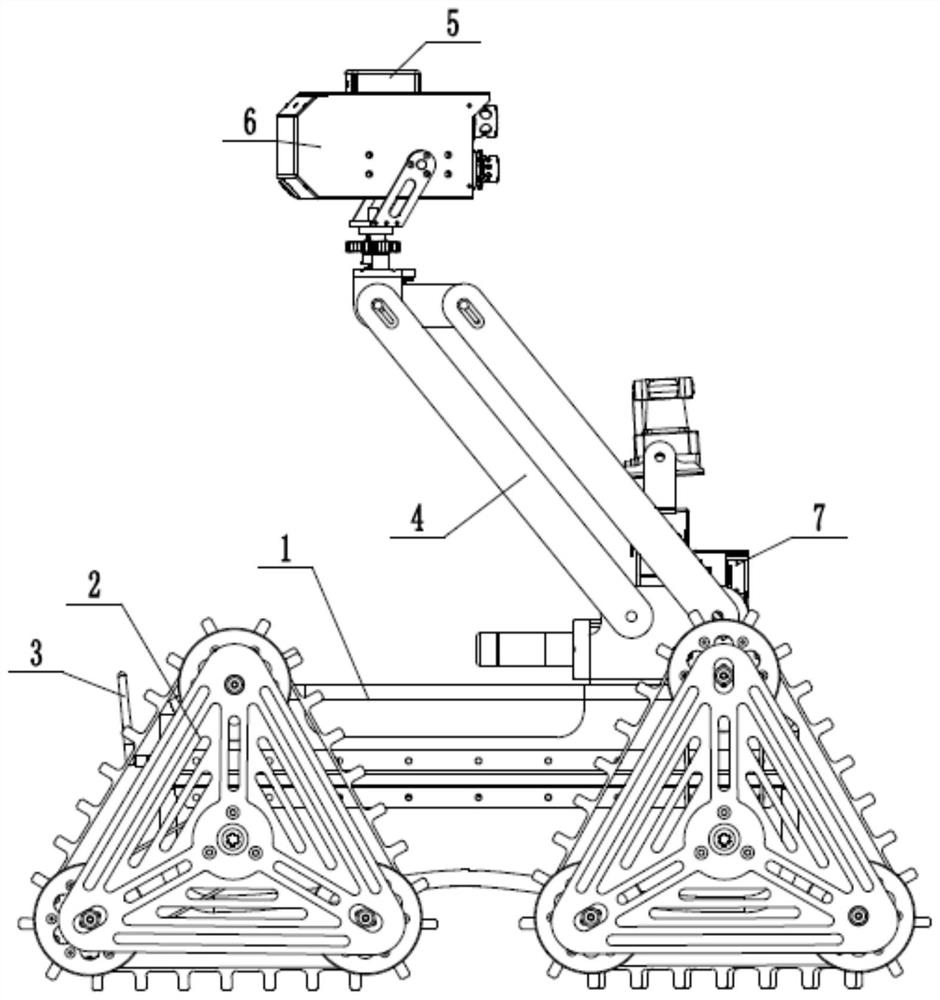
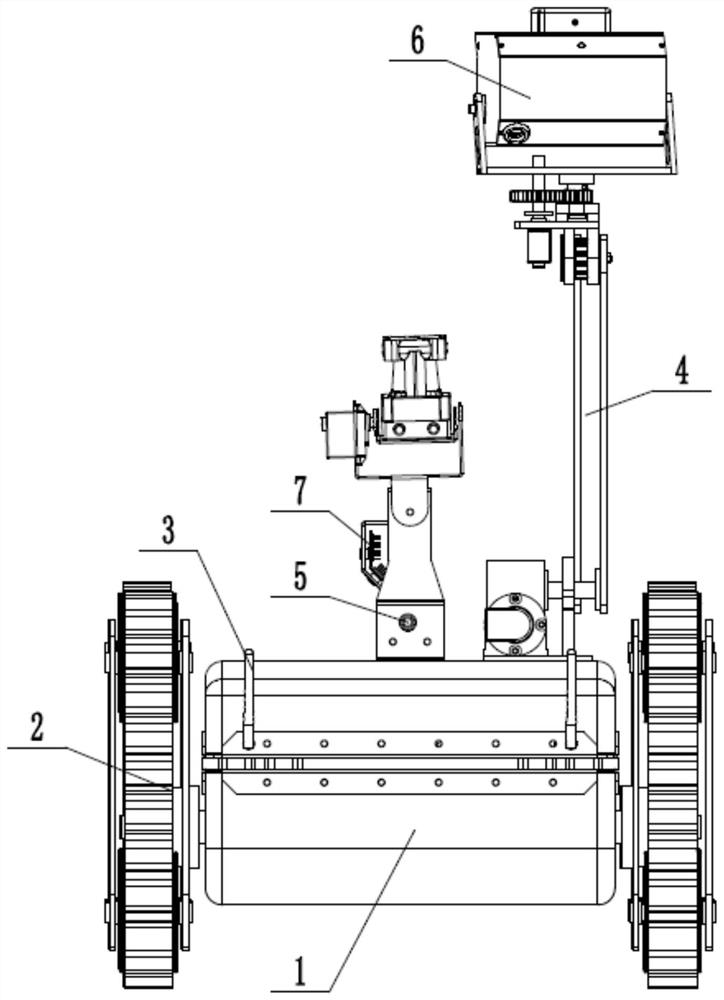
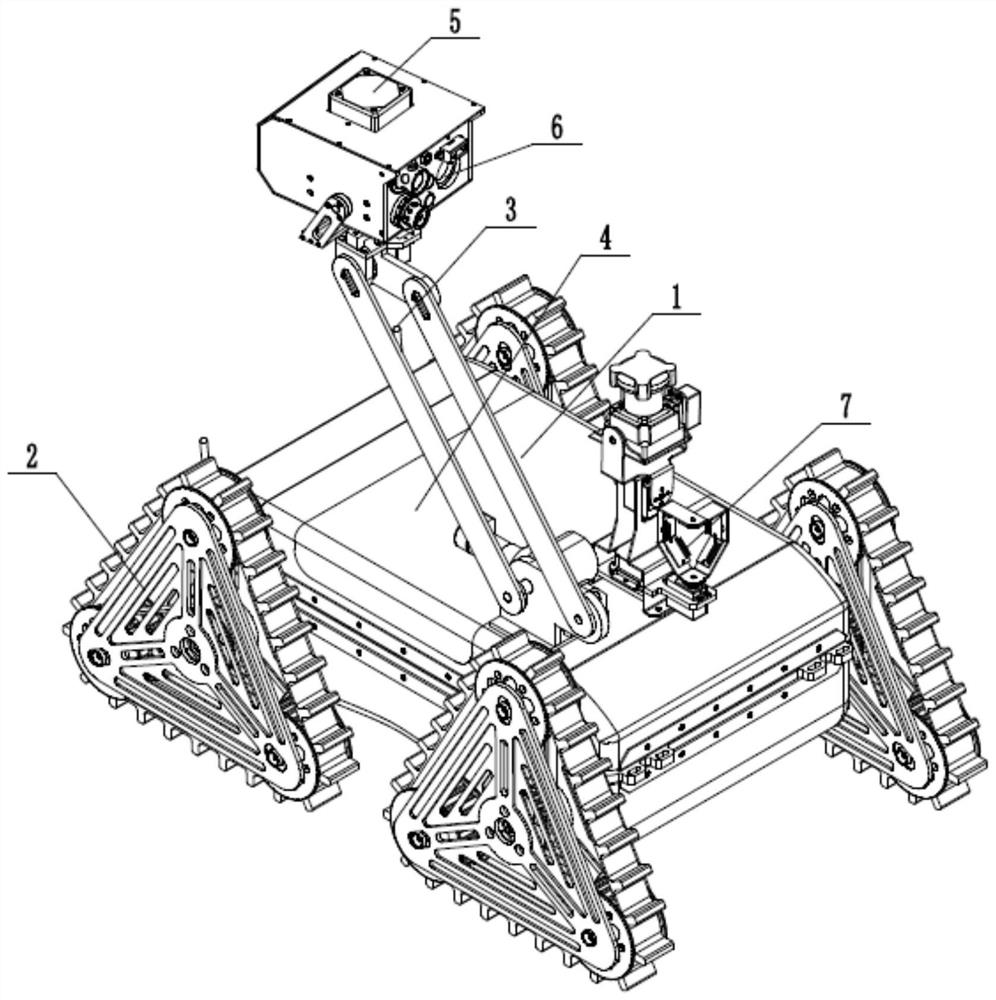
[0033] Embodiment one: see Figure 1-11 , an intelligent inspection robot, which includes a vehicle body 1, a walking mechanism 2, an AGV navigation unit 3, a pose adjustment mechanism 4, a pose detection unit 5, an image acquisition unit 6, an inspection data acquisition unit 7 and a controller.
[0034] The traveling mechanism is arranged on the vehicle body and is used to drive the vehicle body to walk. Preferably, the running mechanism includes a crawler mechanism and a steering mechanism. The steering mechanism and the crawler movement mechanism are respectively controlled by different motors, so that the speed and steering of the adjustment movement, as well as the movement modes such as forward and backward can be realized.
[0035] In addition, the running mechanism can be the same as that of the existing AGV trolley.
[0036] In addition, a storage battery is provided inside the vehicle body to provide power.
[0037] The AGV navigation unit is used to guide the ro...
Embodiment 2
[0066] Embodiment two: see Figure 10-11 , a working method that includes:
[0067] S1, set the inspection route of the robot, and set a number of inspection points on the inspection route, each inspection point corresponds to a standard shooting pose when an image acquisition unit collects images, and establish a number of inspection points and images A database of several standard shooting pose correspondences when the acquisition unit acquires images;
[0068] For example, when inspecting a group of substations in a certain area, first preset the inspection route of the robot, that is, preset the walking guide route data of the robot; Adopt at each parking inspection point to set identification mark), and these 5 parking inspection points can take the view pictures of 5 inspection areas respectively; Then set the angle of the CCD camera when 5 parking inspection points are photographed, The direction and height are used as the standard shooting pose when the image acquisi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More