

Automatic driving vehicle transverse motion control method and device and automatic driving vehicle
A technology of lateral motion and control method, which is applied in the direction of vehicle position/route/height control, non-electric variable control, control/regulation system, etc., which can solve the problems of occupying more computing resources and large amount of calculation, and reduce the amount of calculation , to ensure the effect of convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
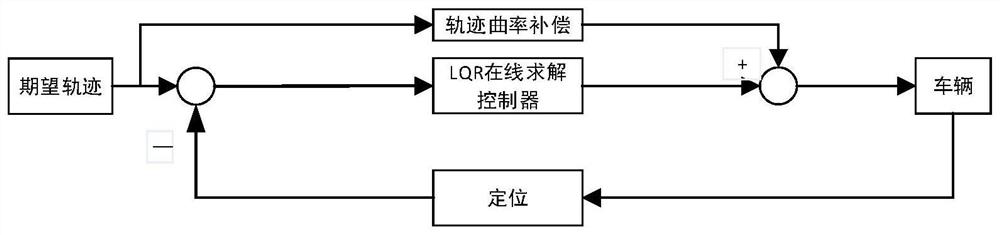
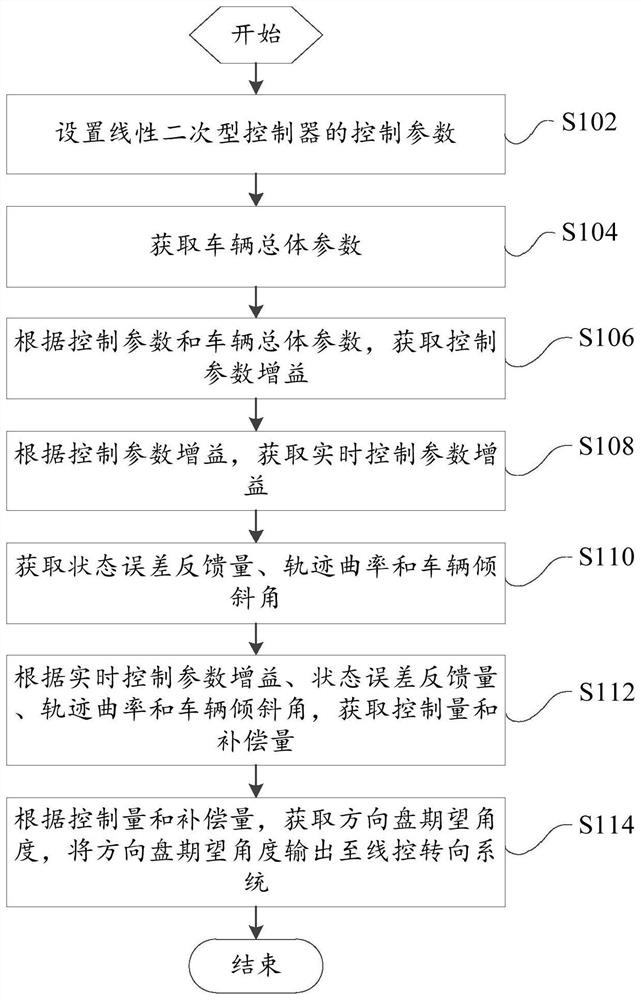
[0094] like figure 2 As shown, this embodiment provides a method for controlling lateral motion of an autonomous vehicle, including:
[0095] Step S102, setting the control parameters of the linear quadratic controller;
[0096] Step S104, acquiring overall parameters of the vehicle;
[0097] Step S106, according to the control parameter and the overall vehicle parameter, obtain the control parameter gain;
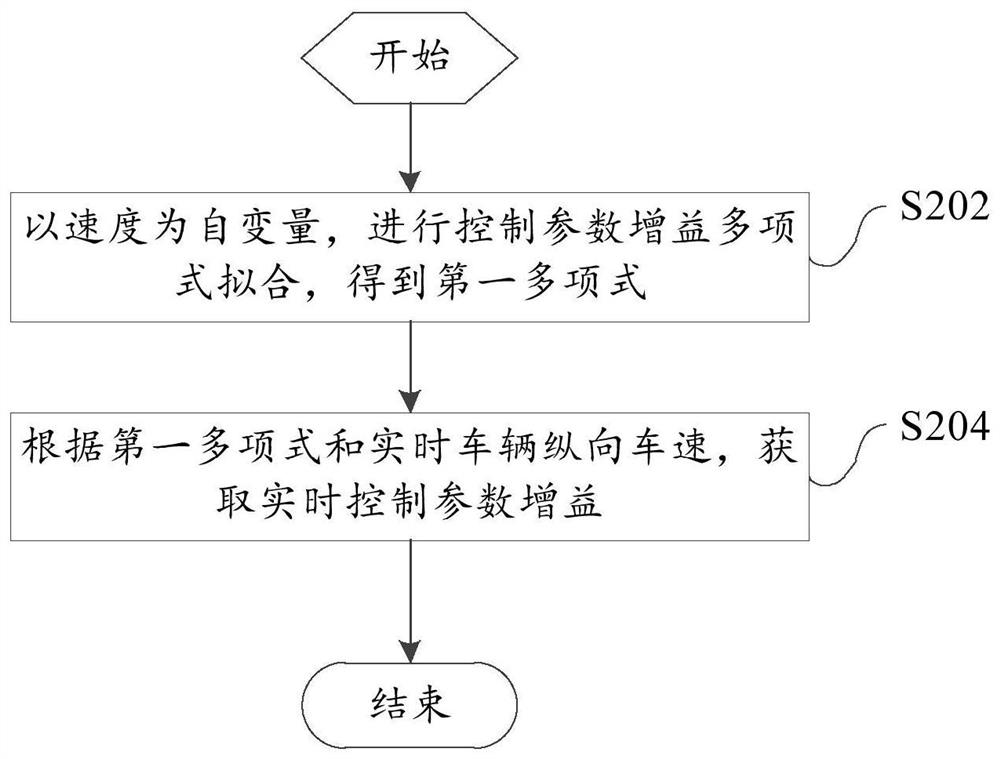
[0098] Step S108, according to the control parameter gain, obtain the real-time control parameter gain;
[0099] Step S110, obtaining state error feedback amount, trajectory curvature and vehicle inclination angle;
[0100] Step S112, obtaining the control amount and compensation amount according to the real-time control parameter gain, state error feedback amount, trajectory curvature and vehicle inclination angle;
[0101] Step S114, according to the control amount and the compensation amount, obtain the desired angle of the steering wheel, and output the desired an...
Embodiment 2
[0104] In addition to the technical features of the above embodiments, this embodiment further includes the following technical features.
[0105] In the above technical solution, setting the control parameters of the linear quadratic controller includes: the control parameters include the first weighting matrix Q and the second weighting matrix R, Q=diag[q 1 ,q 2 ,q 3 ,q 4 ], R=[r], where, q 1 ,q 2 ,q 3 ,q 4 and r are five control parameters respectively, q 2 ,q 4 and r are set to fixed values, q 1 ,q 3 Obtain according to the following formula:
[0106]
[0107]
[0108] Among them, q 1max for q 1 maximum value, q 1min for q 1 min, q 3max for q 3 maximum value, q 3min for q 3 Min, V x is the longitudinal speed of the vehicle, V 1 is the first speed threshold, V 2 is the second speed threshold.
[0109] In this embodiment, q2, q4, and r are set as fixed values, only for q1, q3 according to the vehicle speed V x Perform parameter linear adjustment,...
Embodiment 3
[0111] In addition to the technical features of the above embodiments, this embodiment further includes the following technical features.
[0112] According to the control parameters and the overall parameters of the vehicle, the control parameter gain is obtained, including: the control parameter gain is obtained by the following formula:
[0113]
[0114]
[0115] k 14 =[k 14(1) , k 14(2) , k 14(3) , k 14(4) ]
[0116] k 14 =lqr(A,B,Q,R)
[0117] k 1 =k 14(1)
[0118] k 2 =k 14(2)
[0119] k 3 =k 14(3)
[0120] k 4 =k 14(4)
[0121] Among them, m is the mass of the whole vehicle, I z is the moment of inertia of the vehicle around the vertical direction, l f is the distance from the front axle of the vehicle to the center of mass, l r is the distance from the rear axle of the vehicle to the center of mass, C f is the cornering stiffness of the front wheel, C r is the cornering stiffness of the rear wheel, V x is the longitudinal speed of the vehi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More