

Medical mobile robot path planning method, device, and equipment based on RT-Connect improvement, and medium
A mobile robot and path planning technology, applied in two-dimensional position/channel control, instruments, non-electric variable control, etc., can solve the problems of high time and cost of path planning, difficulty in finding the target point, etc., and achieve the path Reduce planning time cost, improve search efficiency, number of iterations and good effect of path planning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
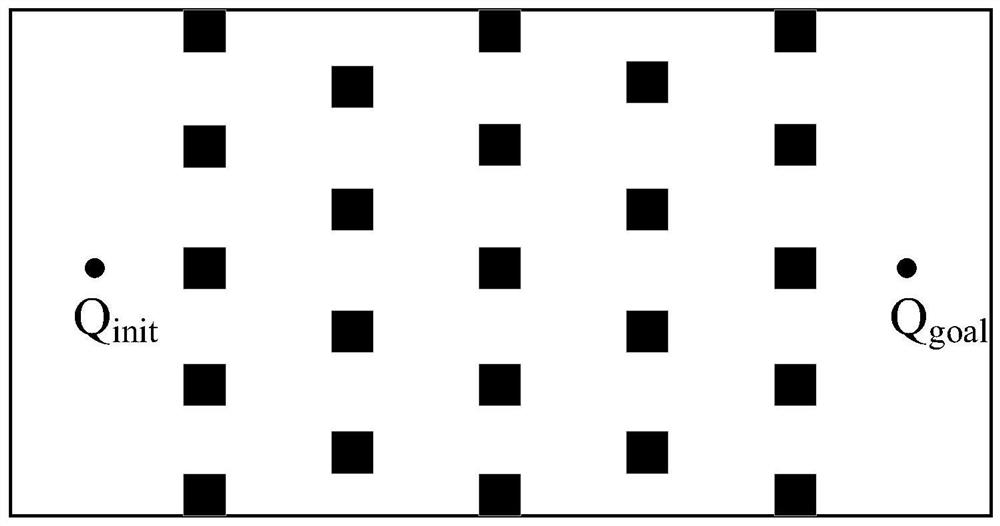
[0051] Preparations: if figure 2 As shown, the range of the environment map is 500×900, and the starting point of the mobile robot is set as Q init =(270, 81), the target point is Q goal =(270,819). The black squares in the figure are obstacles, and the white areas are feasible areas. In the figure, the starting point is on the left side of the map; the destination point is on the right side of the map. When a reliable optimal path is planned, the mobile robot will start from the starting point, follow the planned path, and reach the target point safely and without collision.
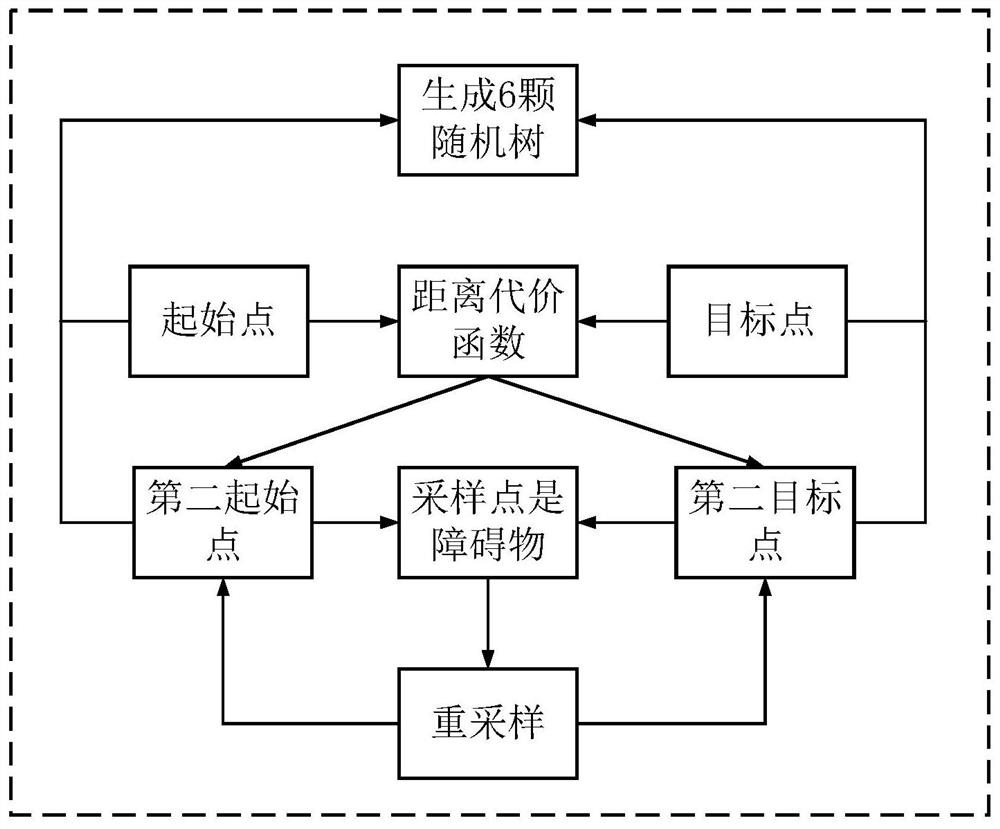
[0052] see figure 1 Shown, the present invention provides a kind of medical mobile robot path planning method based on RRT-Connect improvement, comprises the steps:
[0053] Step 1. Set the starting point Q of the path planning of the mobile robot in the known environment ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More