Picking manipulator and intelligent fruit picker
A robotic arm, fruit machine technology, applied in agricultural machinery and implements, pickers, harvesters, etc., can solve the problems of high labor intensity, high labor cost, low safety, etc., to reduce labor intensity, flexible use, The effect of a wide range of work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
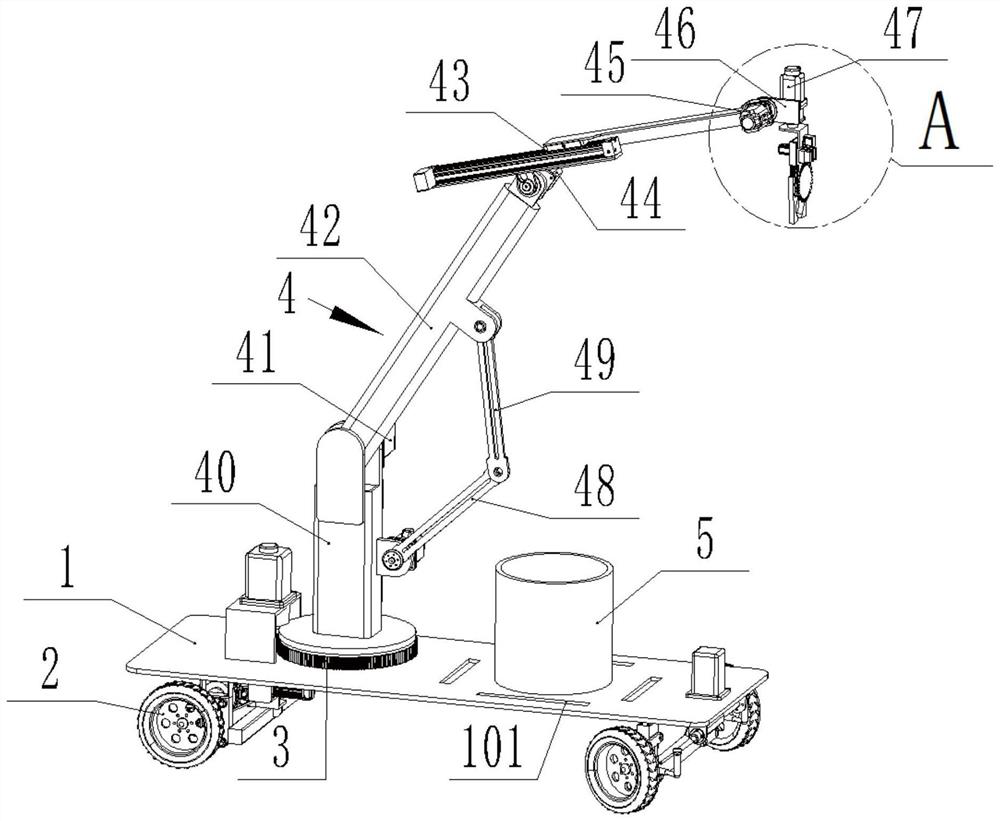
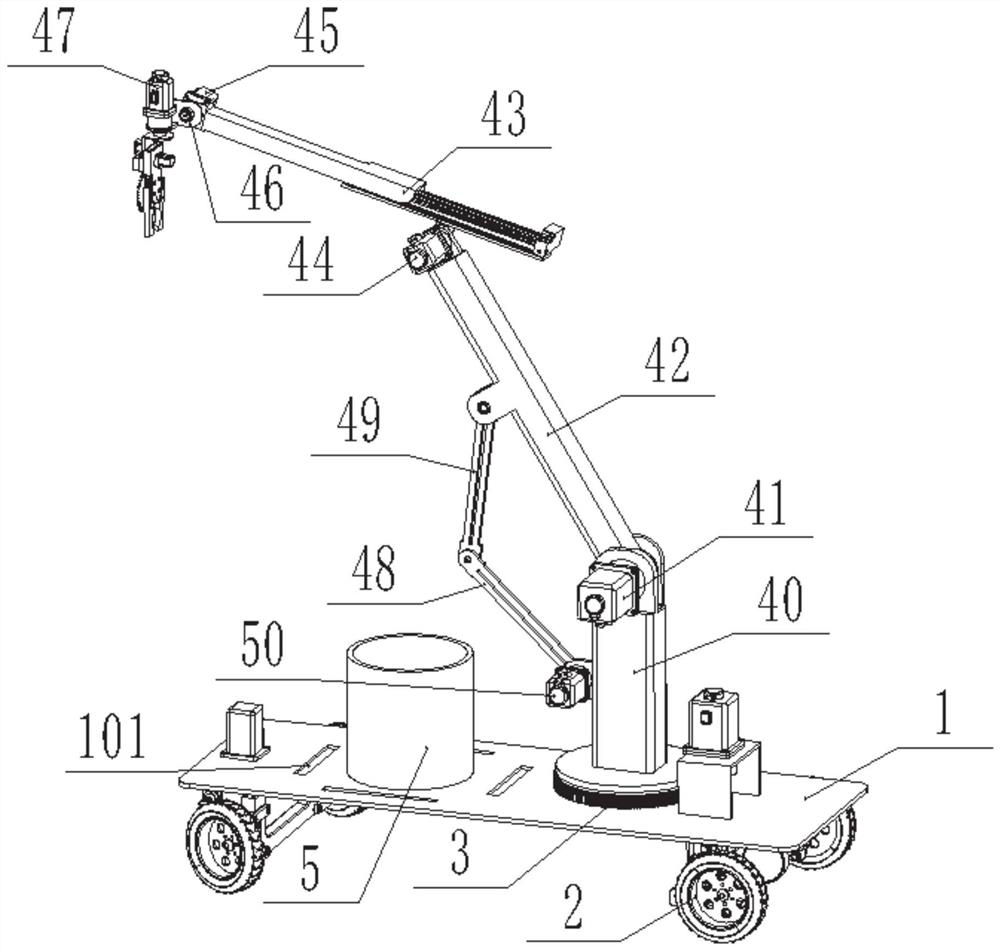
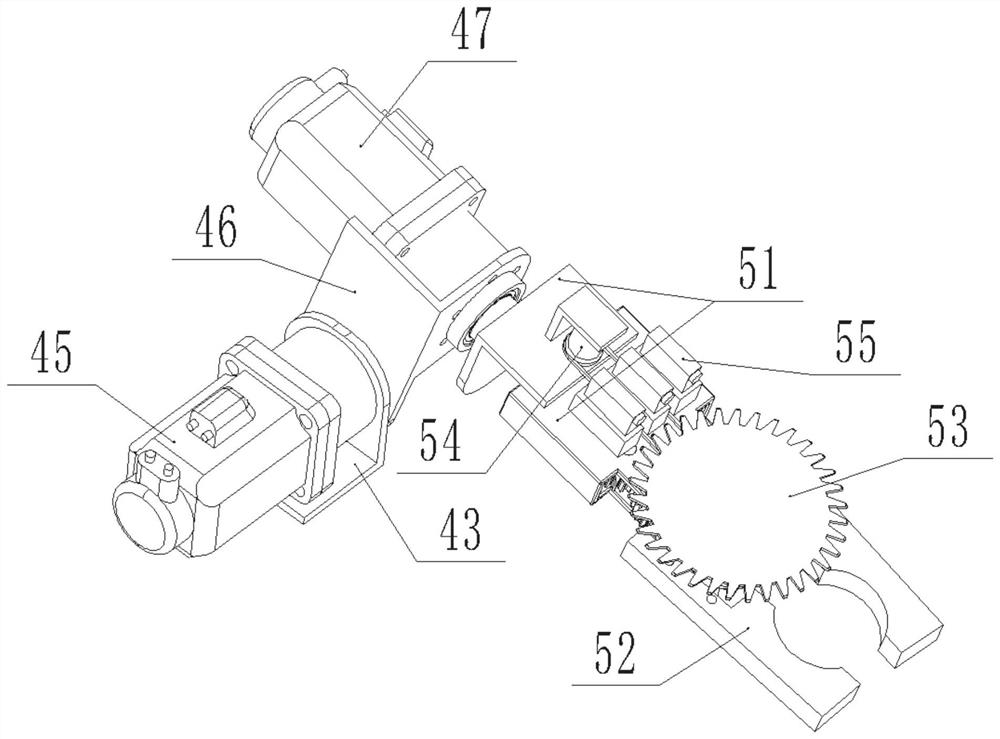
[0031] Such as Figure 1-5 As shown, a picking robot arm 4 provided in this embodiment includes a base 40, a large arm 42, a telescopic forearm 43, a swinging wrist 46, a palm 51, a grasping finger 52, a cutting piece 53, and a first rotating drive assembly 41 , the second rotary drive assembly 44, the third rotary drive assembly 45, the fourth rotary drive assembly 47, the fifth rotary drive assembly 56, the sixth rotary drive assembly 54, the first transmission assembly, the second transmission assembly 57, the first connecting Rod 59, swing gear 58, one end of the boom 41 is hinged to the upper end of the base 40, the first rotary drive assembly 41 is mounted on the base 40 and connected to one end of the boom 41 The other end of the boom 41 is rotationally connected with one end of the telescopic small arm 43, and the second rotary drive assembly 44 is installed at the other end of the boom 41 and is connected with one end of the telescopic small arm 43 Connection; the ot...
Embodiment 2
[0038] Such as Figure 1-8 As shown, an intelligent fruit picking machine provided in this embodiment includes a chassis 1, a traveling mechanism 2, a rotary mechanism 3, a fruit container 5, and the picking robot arm 4 described in Embodiment 1. The traveling mechanism 0 is installed on the The bottom of the chassis 0; the slewing mechanism is installed above the chassis 0; the lower end of the base 40 is connected to the slewing mechanism 3. The fruit container 5 is placed above the chassis 1 .
[0039] In this embodiment, the overall walking is realized by the walking mechanism 1, so as to facilitate the overall movement and large-area picking of fruits. The 360° rotation of the picking robot arm 4 is realized by the turning mechanism 3, and the working range of the picking robot arm 4 is improved. The fruit picked by the picking robot arm 4 is contained in the fruit tube 5 .
[0040] The combination of the chassis 1 and the running mechanism 2 of this embodiment can dir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com