

Robot spot welding parameter and welding quality virtual debugging method and device
A technology for spot welding and welding quality, applied in welding equipment, resistance welding equipment, metal processing equipment, etc., can solve the problems of low efficiency and accuracy, long technical transformation cycle of welding production line, and great influence of human factors, so as to save Labor cost, the effect of improving production efficiency and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
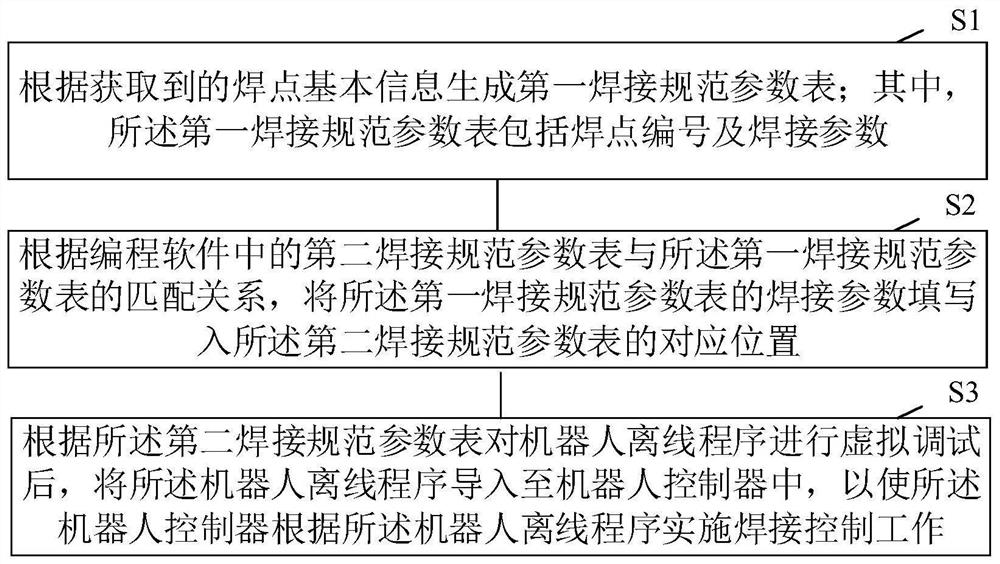
[0039] See figure 1 versus image 3 , The embodiment of the present invention provides a virtual debugging method for robot spot welding welding parameters and welding quality, including the steps:
[0040] S1. Generate a first welding specification parameter table according to the acquired basic information of solder joints; wherein, the first welding specification parameter table includes solder joint numbers and welding parameters.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More