Shank mechanism and biped robot provided with shank mechanism
A calf and ankle technology, applied in the field of biped robots, can solve the problems of large swing inertia, difficult to control, heavy weight, etc., and achieve the effect of improving the load-bearing capacity, easy to control, and high rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
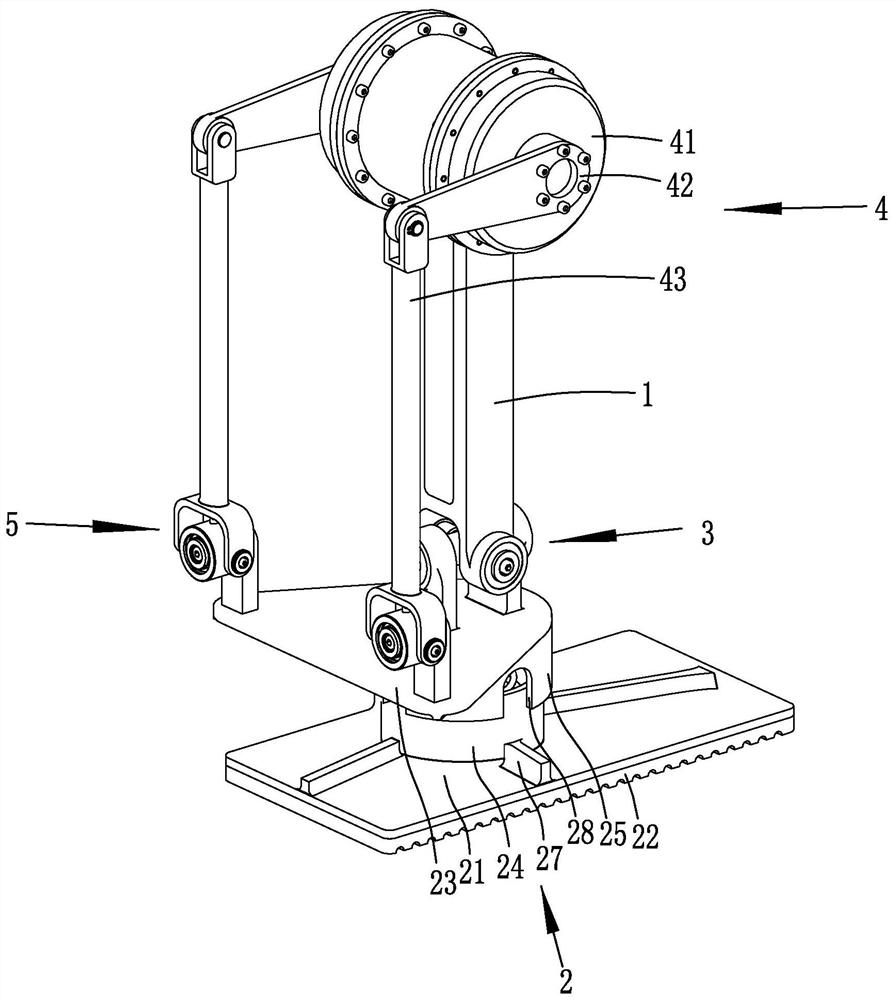
[0041] refer to figure 1 , this embodiment discloses a calf mechanism, including a calf frame 1, an integrated foot 2, an ankle support assembly 3 and two sets of ankle drive assemblies 4, the calf frame 1 and the integrated foot 2 are universally hinged through the ankle support assembly 3, and the ankle The drive assembly 4 is used to drive the integrated foot 2 to rotate around the ankle support assembly 3 .
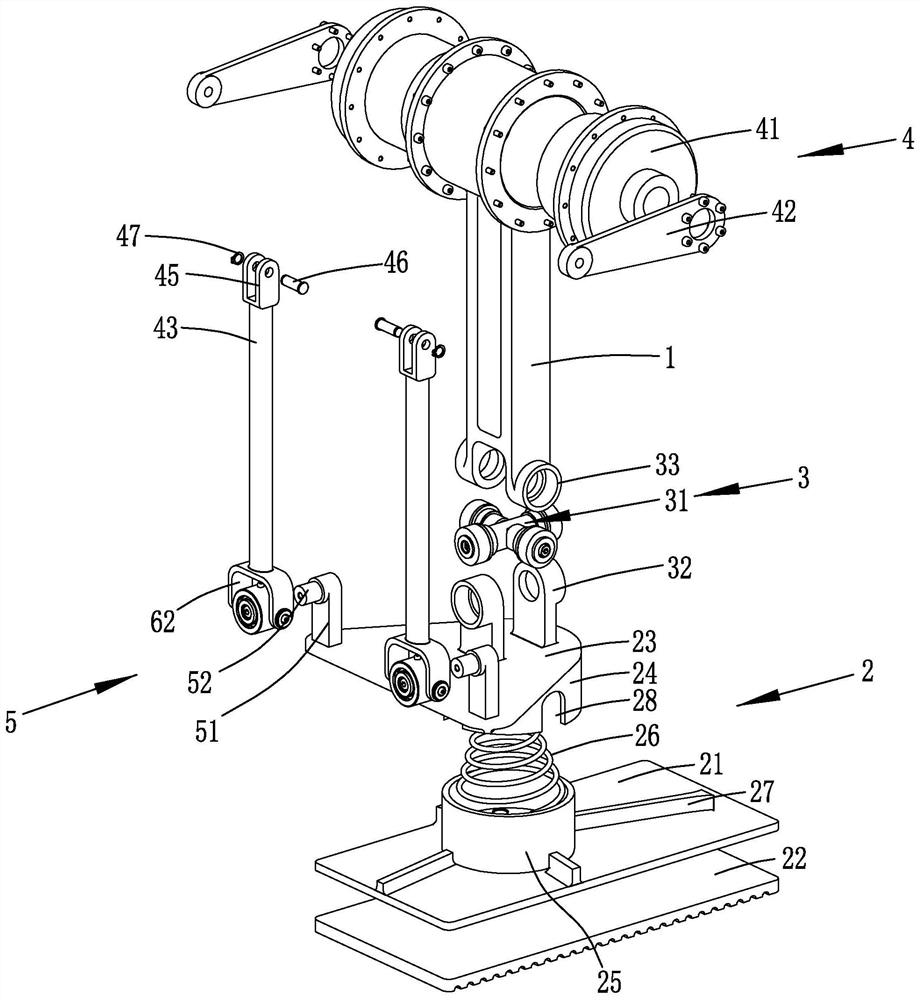
[0042] refer to figure 2 , the integrated foot 2 has good shock-absorbing ability and can adapt to complex terrain, which includes the sole 21, the shock-absorbing pad 22 bonded to the underside of the sole 21, and the support seat 23 arranged above the sole 21, and the upper middle part of the sole 21 A first connecting cylinder 24 is welded, and a second connecting cylinder 25 is welded on the lower side of the support seat 23 , and the second connecting cylinder 25 is sleeved outside the first connecting cylinder 24 and is slidably matched with the first connecti...
Embodiment 2
[0056] This embodiment discloses a biped robot, including the lower leg mechanism in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com