

Human hand posture estimation method and device based on human hand structure guidance in depth image
A technology of depth image and attitude estimation, applied in the field of computer image processing and computer vision, which can solve the problems of lack of stability and achieve the effect of fast speed, small video memory usage and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below through specific embodiments and accompanying drawings.
[0039] The present embodiment provides a method for estimating a hand pose based on a depth image, comprising the following steps:
[0040] 1. Segment the depth image to obtain the human hand area that eliminates the background.
[0041] 1.1) Data acquisition: The data format is a single depth map, which is collected by a depth camera.
[0042] 1.2) Hand segmentation: The hand area is obtained through the existing hand segmentation algorithm based on the depth map, and only the depth map of the hand area is reserved on the image, and the remaining areas are filled with 0.
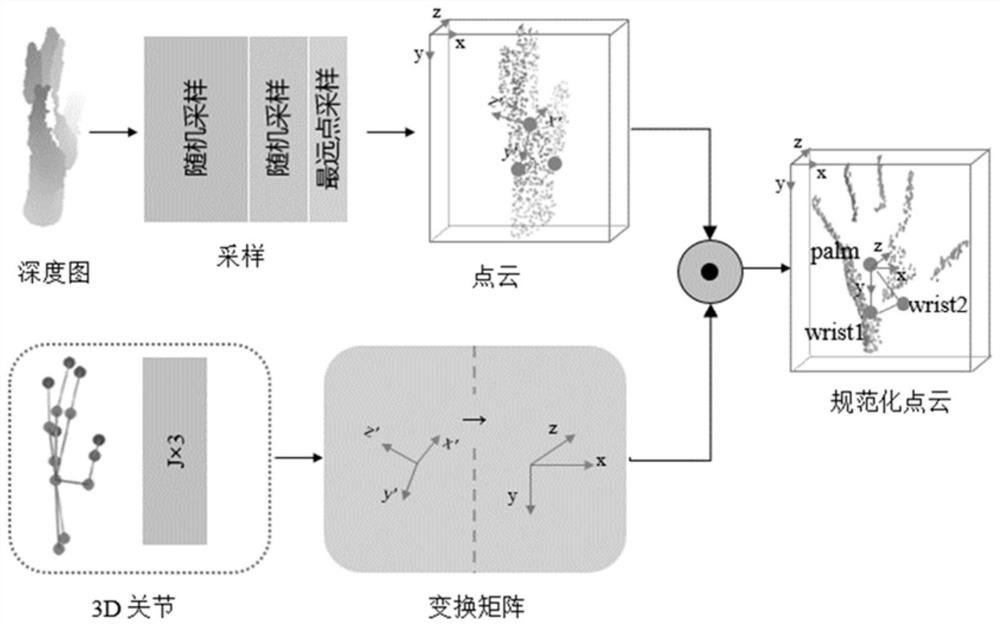
[0043] 2. Sampling the depth image to obtain a point cloud, and normalizing the point cloud.
[0044] 2.1) Sampling: N points are collected by the farthest point sampling al...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More