Intersection signal-vehicle trajectory cooperative control method in vehicle-road cooperative environment
A technology of vehicle trajectory and vehicle-road coordination, which is applied to the traffic control system of road vehicles, traffic control systems, and control traffic signals, etc., and can solve problems such as vehicle conflicts, waste of green light time, and reduced intersection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
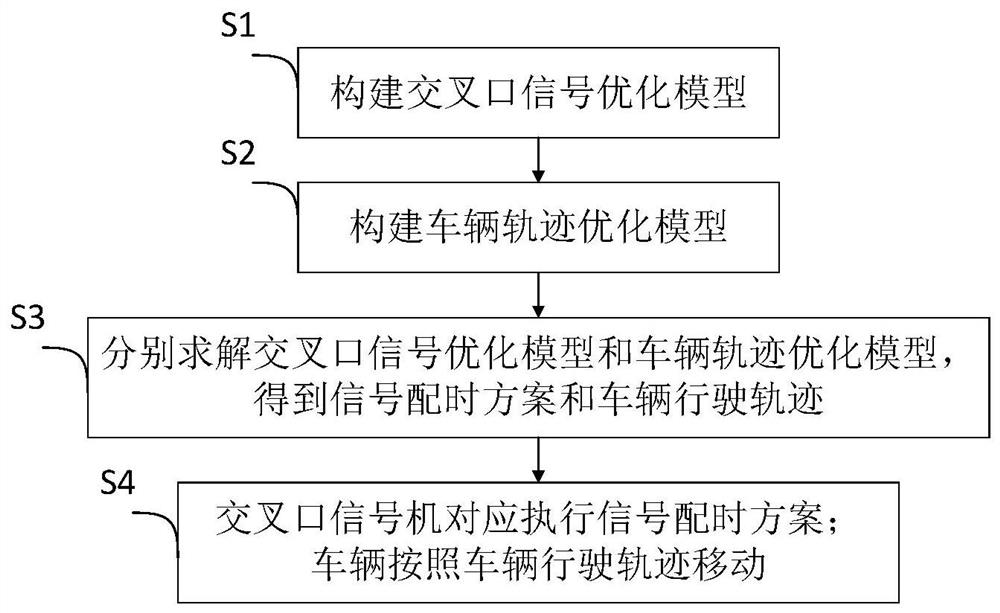
[0083] like figure 1 As shown, an intersection signal-vehicle trajectory cooperative control method in a vehicle cooperative environment includes the following steps:
[0084] S1. Construct an intersection signal optimization model. The objective function of the intersection signal optimization model is to minimize the average vehicle delay. The constraints include: green light duration constraints, green light interval constraints, vehicle arrival stop line state constraints, and vehicle passing through the intersection constraints;
[0085] S2. Build a vehicle trajectory optimization model. The objective function of the vehicle trajectory optimization model is to minimize vehicle fuel consumption, and the constraints include: vehicle dynamics constraints, vehicle speed constraints, vehicle acceleration constraints, vehicle distance constraints, and vehicle passing stop line state constraints;
[0086] S3. Respectively solve the intersection signal optimization model and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com