

Unmanned aerial vehicle cluster dynamic task allocation method simulating wolf pack cooperative hunting mechanism
An allocation method, technology for dynamic tasks, applied in non-electric variable control, control/regulation systems, 3D position/course control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
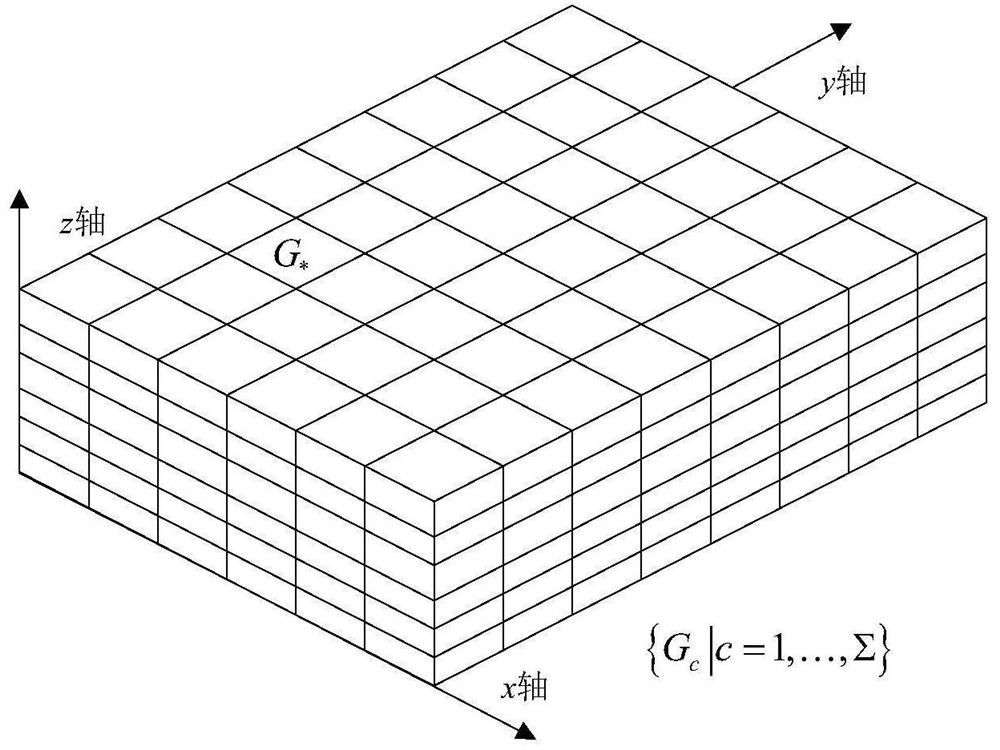
[0122] The effectiveness of the dynamic task allocation method proposed in the present invention is verified below through specific examples. In this example, given N U = 5 unmanned aerial vehicles conduct reconnaissance and attack integrated operations on an unknown area of 20km × 20km × 500m, and randomly deploy N T = 10 moving targets. The simulation environment configuration of this example is intel i7-4790 processor, 3.60Ghz main frequency, 4G memory, the software is MATLAB 2010a version, and the simulation time is T max = 10 min.
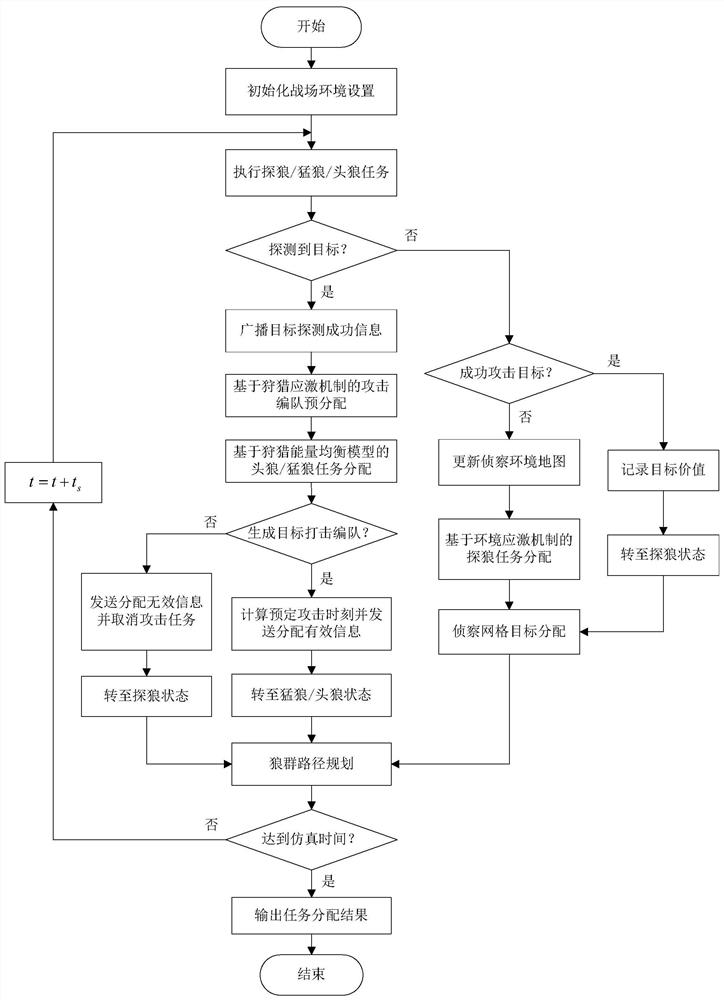
[0123] A dynamic task allocation method for UAV clusters imitating the cooperative hunting mechanism of wolves, and its realization process is as follows: image 3 As shown, the specific practical steps of this example are as follows:
[0124] Step 1: Initialize battlefield environment settings
[0125] (1) Initialize the UAV six-degree-of-freedom motion control model
[0126] The six-degree-of-freedom motion control model of the UAV i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More