

Flexible mechanical arm and central pattern generator-based control method
A technology of flexible manipulator and pattern generator, applied in the field of manipulator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
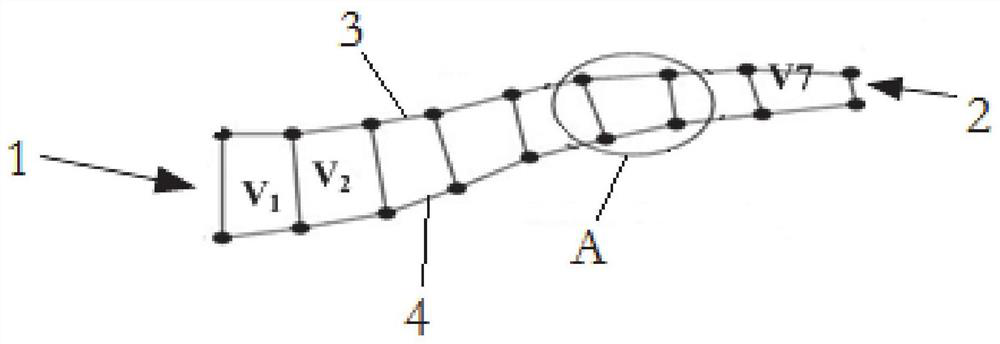
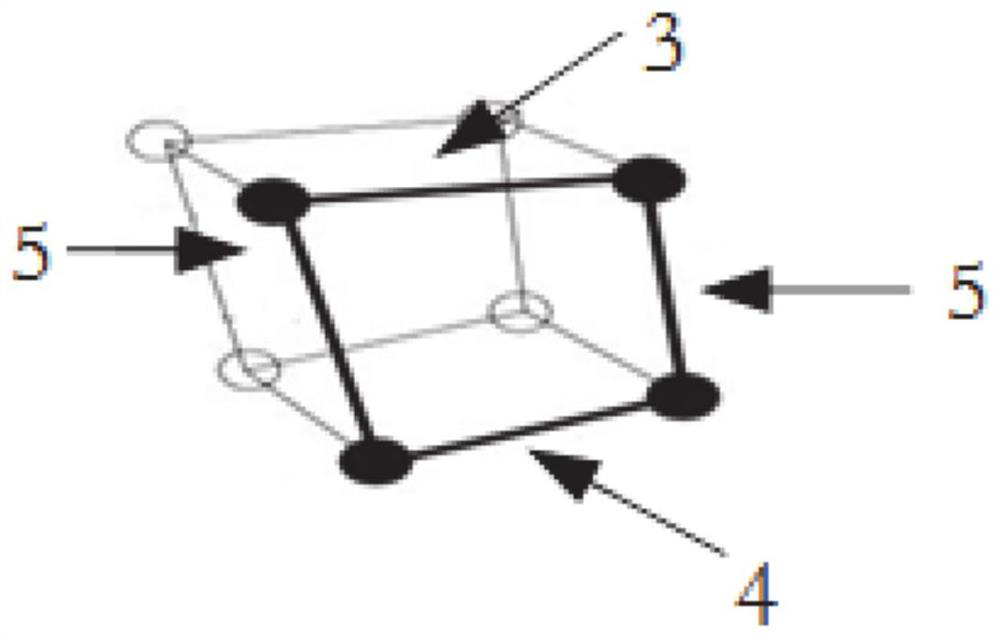
[0030] Such as Figure 1-2 As shown, this embodiment provides a flexible robotic arm, which includes a plurality of flexible modules sequentially connected along a set direction, and also includes a plurality of central mode generators coupled to each other.
[0031] Each flexible module includes an elastic shell, the inner cavity of the elastic shell is filled with working medium, the volume of each flexible module is constant, the elastic shell includes two transverse planes, and the extending direction of multiple flexible modules passes through the a transverse plane, two transverse planes connected by a longitudinal plane to form a closed elastic shell;
[0032] The central mode generator can individually control each flexible module to elastically deform along a set direction, and make the area of the transverse plane and the longitudinal plane change in inverse proportion, thereby making the whole flexible manipulator move along the set trajectory.
[0033] In this e...
Embodiment 2
[0039] This embodiment provides a method for controlling a manipulator based on a central mode generator, which is used to realize the control of the flexible manipulator, including the following steps,
[0040] 1) According to figure 1 Structure, set the size of each module of the manipulator, and then determine the coordinates of the horizontal and vertical parts;
[0041] 2) figure 1 The mechanical arm mainly includes four kinds of forces, the first is the internal force F generated by the mechanical arm m ; The second is the vertical force F g ; The third is the pulling force F caused by the working medium w ; The fourth is the internal force F generated to keep the volume constant c . And then get the equation of motion:
[0042]
[0043] In formula (1), M is the mass matrix, and q is the position vector.
[0044] f g =(ρ arm -ρ medium )V arm g(2);
[0045] In formula (2), ρ arm is the density of the manipulator, ρ medium is the density of the working med...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More