

Vehicle following control method and device, vehicle and storage medium
A control method and vehicle technology, applied in control devices, vehicle components, transportation and packaging, etc., can solve problems affecting driving experience, reducing driving safety, and camera recognition obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
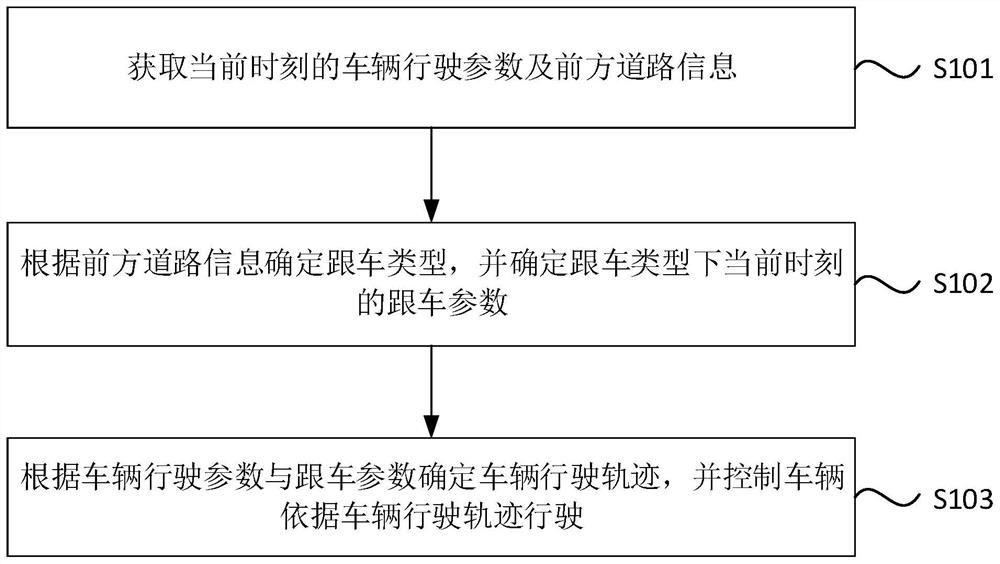
[0033] figure 1 It is a flow chart of a car following control method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where the vehicle traffic jam assist system performs lateral centering control on the vehicle when the lane line is unclear or disappears. The method can It is executed by the vehicle following control device, the vehicle following control device may be implemented by software and / or hardware, the vehicle following control device may be configured on a computing device, and specifically includes the following steps:
[0034] S101. Obtain vehicle driving parameters and road ahead information at the current moment.
[0035] Wherein, the vehicle driving parameter can be understood as a characteristic value used to represent the driving state of the vehicle at the current moment. Optionally, the vehicle driving parameter can include the vehicle's own speed, yaw rate, steering angle, and lateral acceleration. The abo...
Embodiment 2
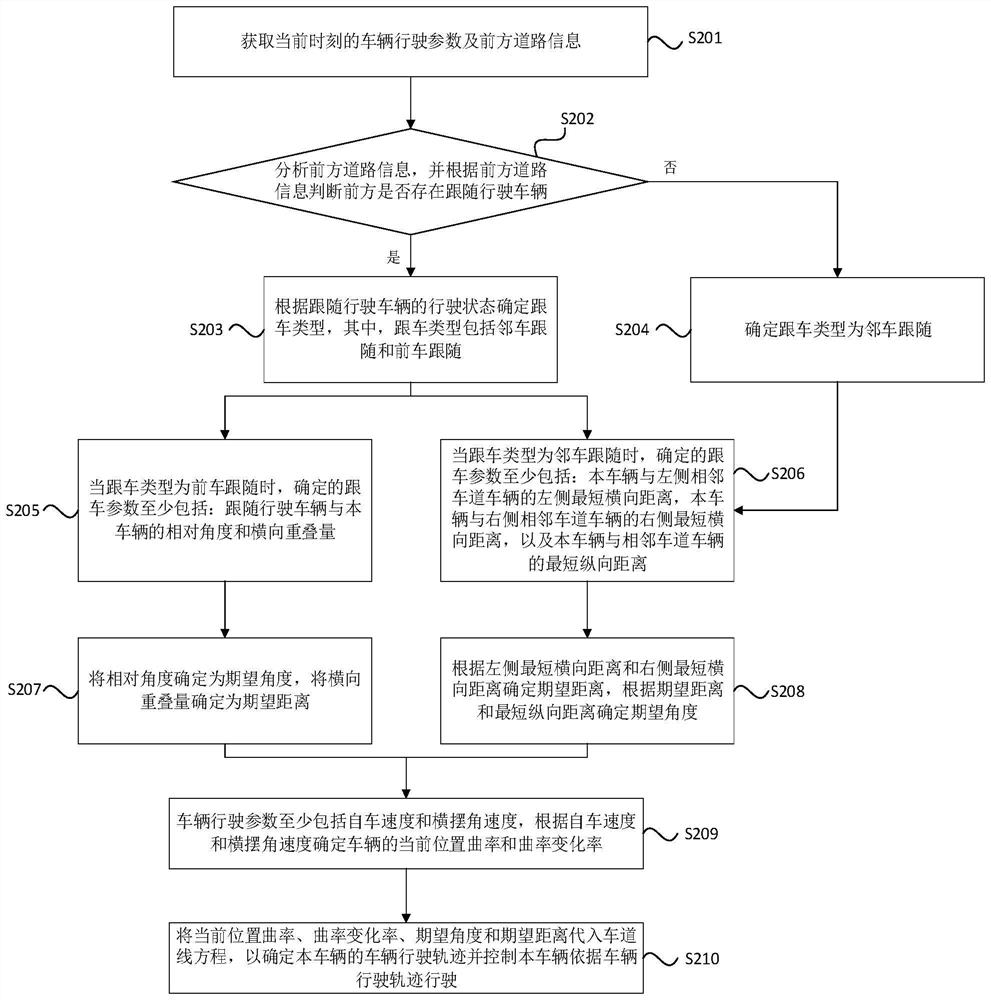
[0046] figure 2 It is a flow chart of a vehicle following control method provided by Embodiment 2 of the present invention. The technical solution of this embodiment is further refined on the basis of the above-mentioned technical solution, specifically including the following steps:
[0047] S201. Obtain vehicle driving parameters and road ahead information at the current moment.
[0048] S202. Analyze the road ahead information, and judge whether there is a following vehicle ahead according to the road ahead information.
[0049] Specifically, the video information in front of the vehicle's driving direction is obtained through the front-view camera, and the radar information directly in front of the vehicle's driving direction is obtained through the front radar. The vehicle acts as a following vehicle.
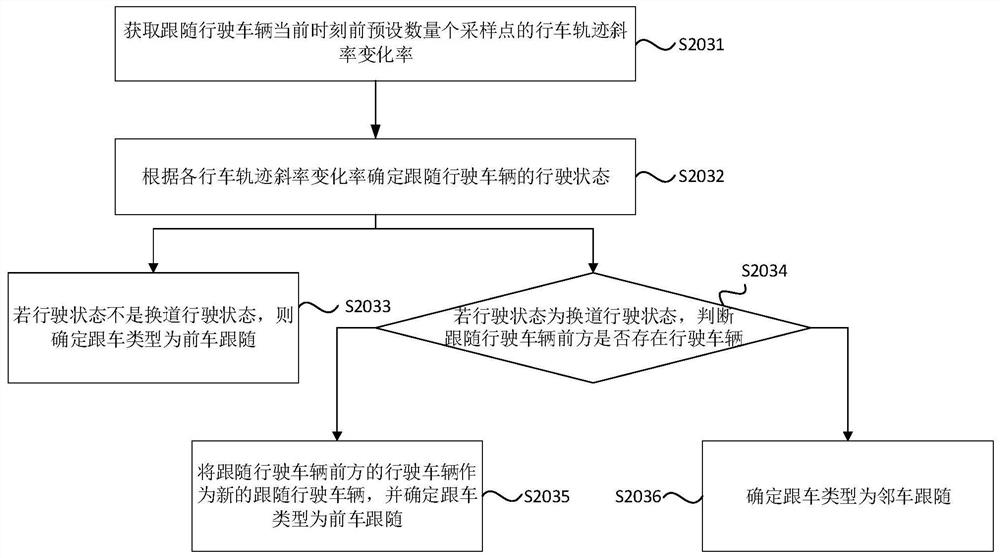
[0050] S203. When there is a following vehicle ahead, determine a vehicle following type according to the driving state of the following vehicle, wherein the vehicle f...
Embodiment 3
[0107] Figure 7 It is a schematic structural diagram of a vehicle following control device provided by Embodiment 3 of the present invention, the vehicle following control device includes: an information acquisition module 31 , a parameter determination module 32 and a driving trajectory determination module 33 .
[0108] Among them, the information acquisition module 31 is used to obtain vehicle driving parameters and road information ahead at the current moment; the parameter determination module 32 is used to determine the vehicle-following type according to the road ahead information, and determine the vehicle-following type at the current moment under the vehicle-following type. Car-following parameters; a driving trajectory determining module 33, configured to determine the vehicle driving trajectory according to the vehicle driving parameters and the vehicle-following parameters, and control the vehicle to travel according to the vehicle driving trajectory.
[0109] Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More