

Multi-source fusion navigation method based on factor graph and observability analysis
A technology that integrates navigation and factor graphs. It is used in mapping and navigation, navigation through velocity/acceleration measurement, and navigation. It can solve problems that affect the accuracy and reliability of inertial-based integrated navigation systems, and short-term or long-term sensor failures. Achieve the effect of self-adaptive fusion and safe and reliable navigation and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
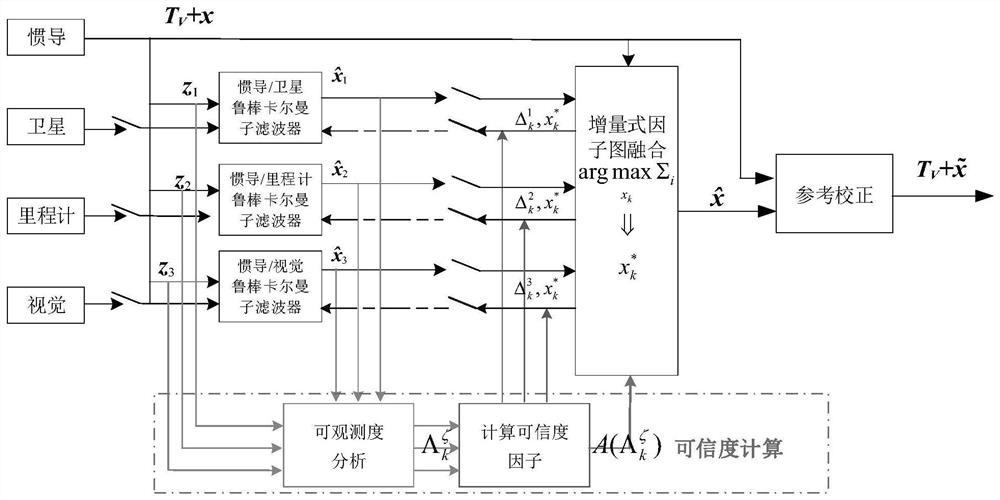
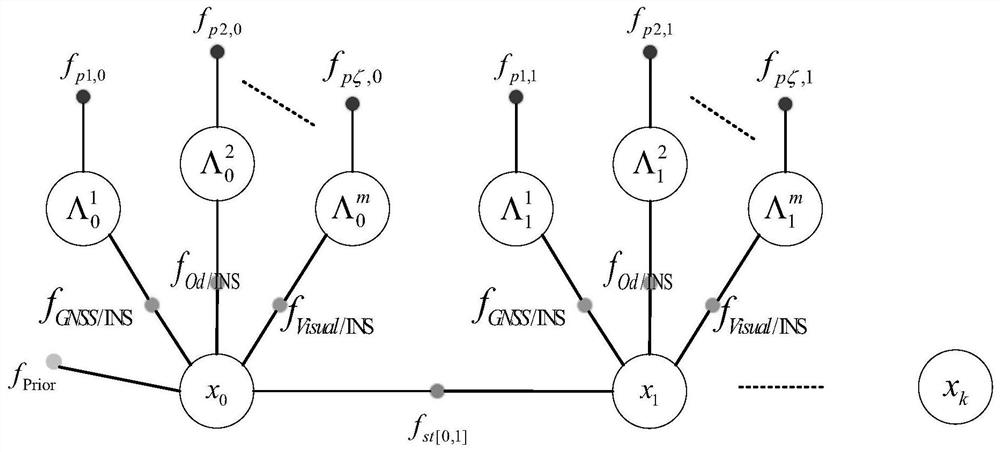
[0062] combine figure 1 , the present invention designs a cross-scenario multi-source fusion navigation system to actively adapt to complex dynamic scene changes. First, construct the Kalman sub-filter for integrated navigation of inertial / satellite, inertial / vision, etc., optimize the filtering algorithm and reduce the influence of uncertain factors by designing an adaptive and robust Kalman filtering algorithm; then, based on the dynamic time-varying system The observability analysis of integrated navigation factors such as inertial / satellite and inertial / vision is measured online; finally, the incremental factor atlas fusion architecture is used to construct the reliability of each inertial-based integrated navigation factor (subsystem). The trust factor is constructed with active optimization factors to realize multi-sensor adaptive fusion navigation and real-time precise positioning.
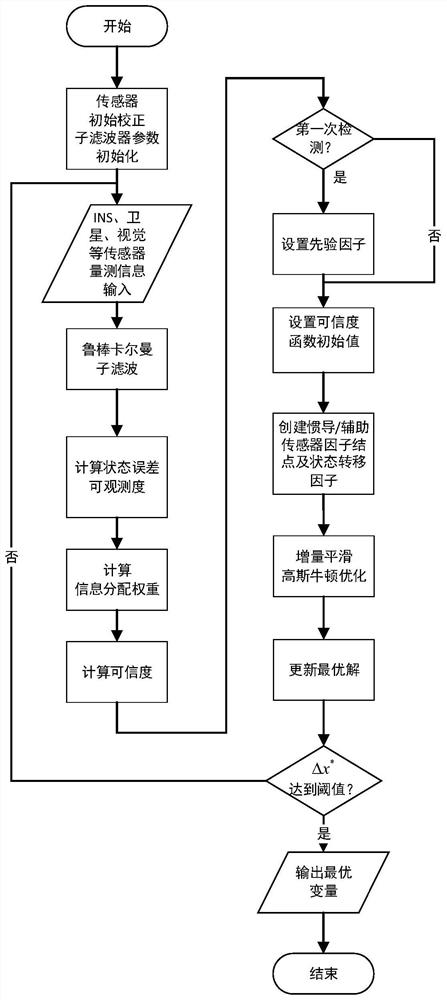
[0063] combine figure 2 , first obtain the measurement information of the sensor, ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More