Robot
A robot and drive motor technology, applied in the field of robotics, can solve problems such as complex algorithm logic
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
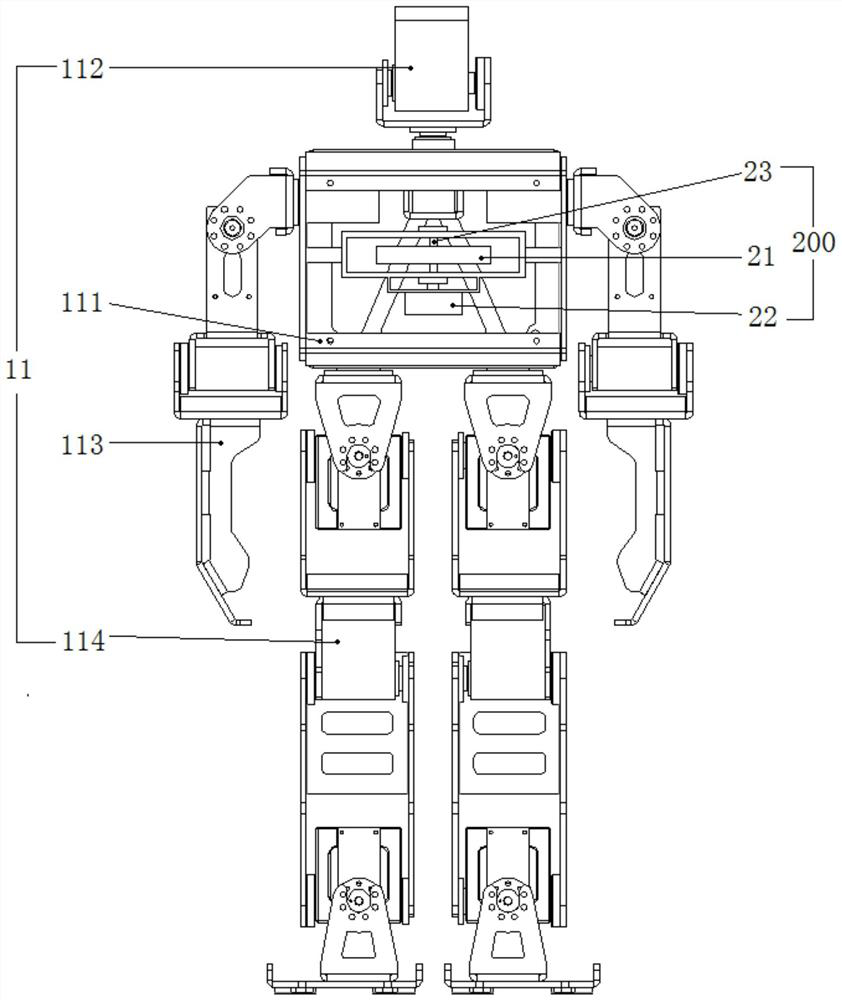
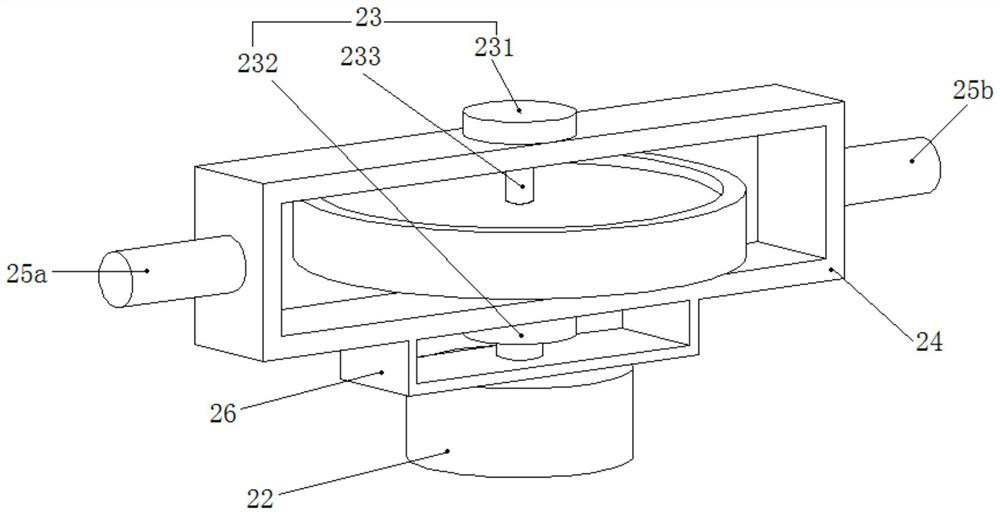
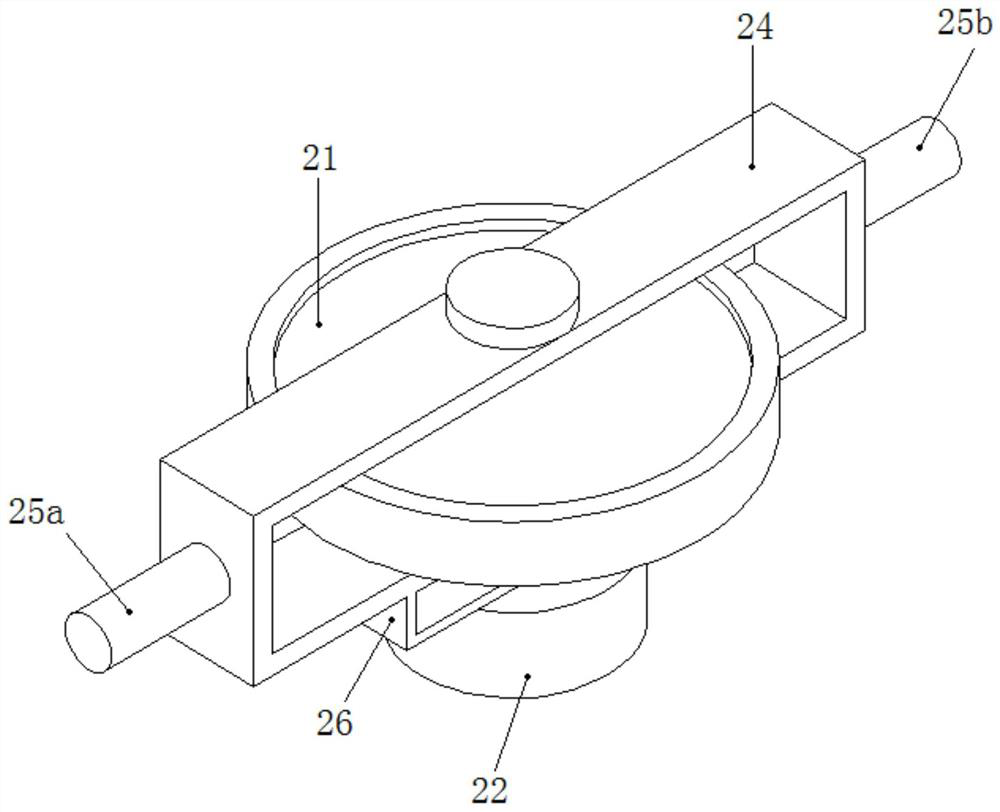
[0052] The embodiment of the present invention provides a robot, as attached figure 1 As shown, the robot includes: a robot body and a balance assembly 200; the balance assembly 200 includes: a rotor 21 and a drive motor 22; The walking surface is vertical; the output shaft of the driving motor 22 is connected with the rotating shaft 23 .
[0053] As an example, the main body of the robot includes: a housing 11, and an attitude sensor, a multi-degree-of-freedom motor, and a walking control system respectively arranged in the housing 11; the walking control system is electrically coupled with the attitude sensor and the multi-degree-of-freedom motor respectively The multi-degree-of-freedom motor is used to drive the housing 11 to walk;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More