

In-loop simulation method for automatic driving software
A technology of automatic driving and simulation methods, which is applied in the direction of instruments, control/adjustment systems, simulators, etc., can solve the problems of high-speed tcp communication uncertain delay, data timing confusion, and simulation results are wrong, so as to save verification costs, The effect of meeting the accuracy requirement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
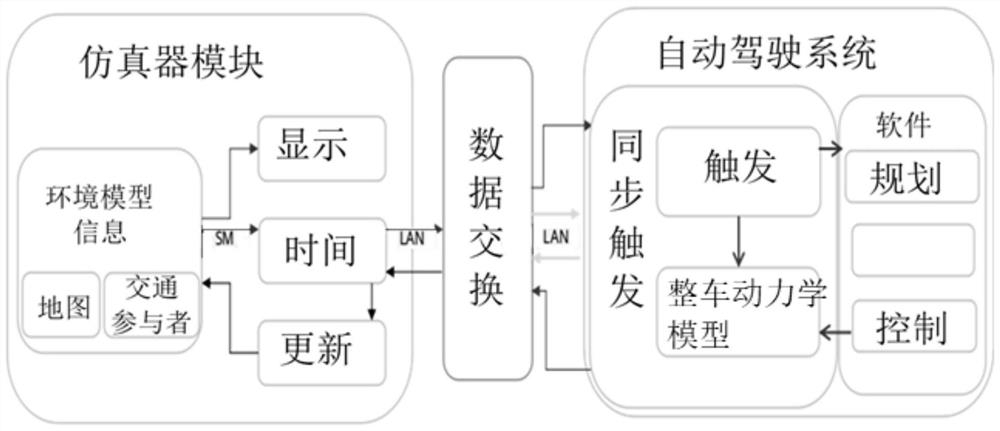
[0020] The automatic driving software-in-the-loop simulation method of the present invention uses a distributed architecture to perform in-the-loop simulation. The vehicle dynamics model, the simulator module and the automatic driving software system run in different systems respectively, and the simulator module and the automatic driving software system pass data The interactive module is connected, the environment data is output from the simulator module to the corresponding receiving end of the automatic driving software system, and the control quantity fed back by the automatic driving software system is output to the vehicle dynamics model; the vehicle dynamics model and the autom...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More