

Visual target detection method for detection robot
A technology of robot vision and target detection, applied in neural learning methods, instruments, computer components, etc., can solve problems such as loss of important targets or target recognition errors in the visual system, and failure to meet real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0060] A method for detecting a visual target of a detection robot according to the present invention, comprising:
[0061] Step 1: Build a hybrid attention adaptive perception network;
[0062] Step 2: training the mixed attention adaptive perception network;
[0063] Step 3: Use the trained mixed-attention adaptive perception network for object detection in detection robot vision.
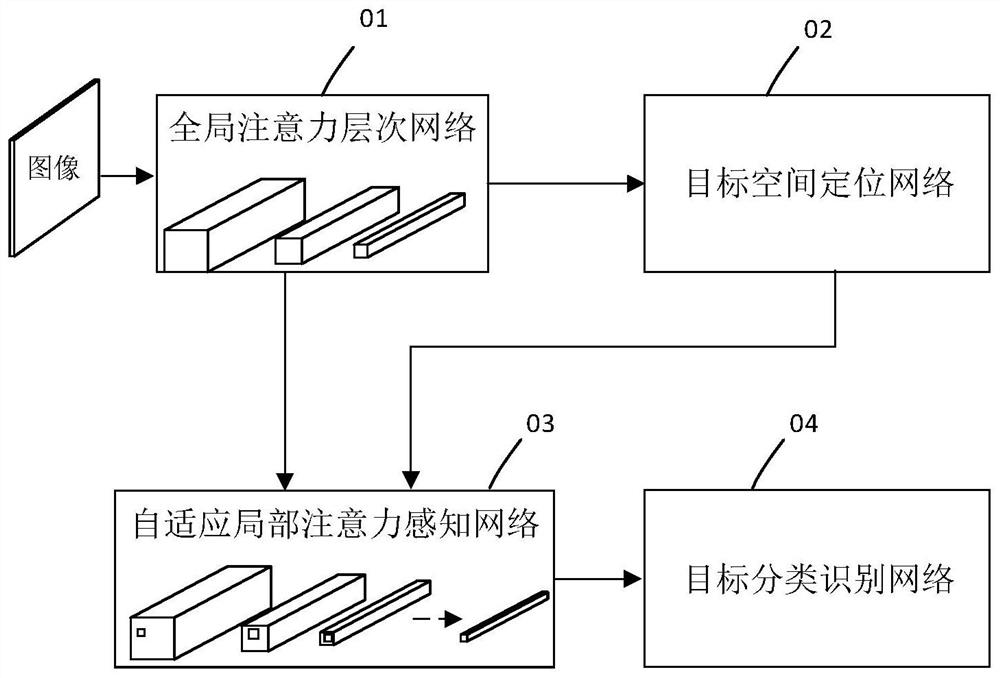
[0064] In the example, such as figure 1 As shown, the mixed attention adaptive perception network constructed in the step 1 includes: a global attention level network 01, a target space positioning network 02, an adaptive local attention perception network 03, and a target classification recognition network 04;
[0065] The global attention hierarchical network 01 is used to extract depth features at different scales;
[0066] The target space positioning netw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More