

A UAV Pose Estimation Method Based on Trapezoid and Circular Landmarks
A pose estimation and UAV technology, applied in the field of image processing, can solve the problems of inability to obtain UAV flight elevation information and attitude parameters accurately and in real time, difficult to ensure positioning accuracy, and slow processing speed, etc., to achieve timeliness Strong performance, high estimation accuracy, exact solution effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
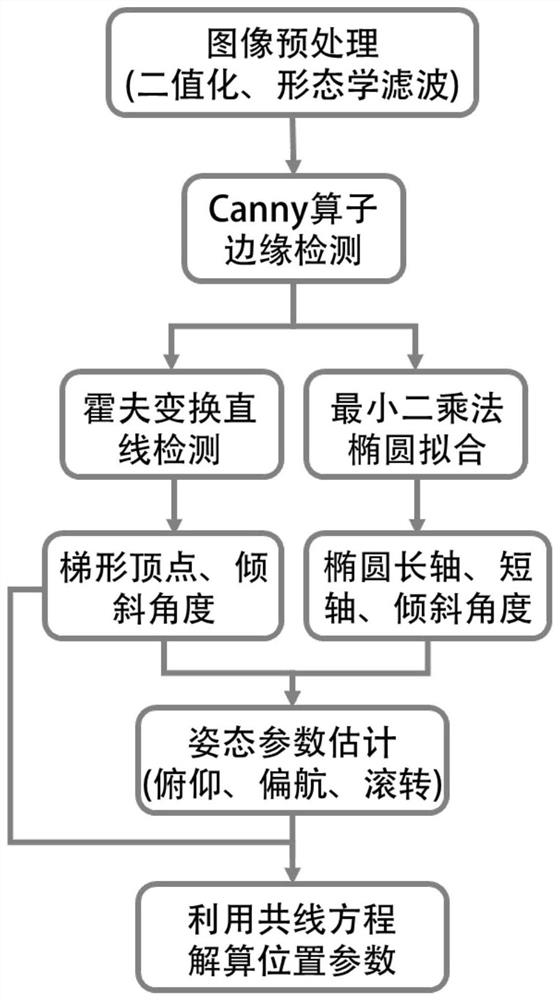
[0031] Specific Embodiment 1: This embodiment describes a UAV pose estimation method based on a combination of trapezoid and circle landmarks, which can be applied to UAV autonomous attitude control, automatic landing, etc., by combining trapezoid and circle into a landmark pattern, and its estimation flow chart is as follows figure 1 , the method steps are as follows:
[0032] Step 1: UAV binarizes the landmark pattern imaging to segment the landmark pattern, and removes isolated noise based on morphological filtering;
[0033] Step 2: Extract the edge of the landmark, use the Hough transform to extract the straight line information of the trapezoidal contour in the landmark, use the least square method to fit the ellipse equation and calculate the ellipse parameters;
[0034] Step 3: Solve the UAV attitude parameters according to the ellipse parameters calculated in Step 2;
[0035] Step 4: Use the UAV attitude parameters in Step 3 to establish a UAV ground imaging model, ...
specific Embodiment approach 2
[0036] Specific embodiment two: a kind of UAV pose estimation method based on trapezoidal and circular combination landmark described in specific embodiment one, the specific steps of step one are as follows:
[0037] (1) Perform image binarization
[0038] A threshold is set for the ground imaging results of the UAV. Pixels whose gray value is greater than or equal to the threshold can be regarded as target graphics, and their gray value is represented by 1. Pixels whose gray value is smaller than the threshold are judged as The background area, its gray value is represented by 0;
[0039]
[0040] Among them, f represents the input image, Th is the binarization threshold; x, y represent the pixel coordinates; the binarized image of the imaging result is as follows figure 2 shown;
[0041] (2) Morphological filtering
[0042] The binarized image processed by step (1) is successively subjected to opening and closing operations to remove isolated noise, and the processin...
specific Embodiment approach 3
[0043] Specific embodiment three: a kind of UAV pose estimation method based on trapezoidal and circular combination landmark described in specific embodiment one, the specific steps of step two are as follows:
[0044] (1) Based on the Canny operator, edge detection is performed on the binarized image after step 1 morphological filtering, and trapezoidal and elliptical contours are extracted;
[0045] (2) Set the coordinate point of the ellipse contour (x 1 ,y 1 ),(x 2 ,y 2 ),…(x n ,y n ), the normal equation can be obtained by using the least square method:
[0046]
[0047] Among them, A, B, C, D, E are the undetermined coefficients of the elliptic contour curve equation, is the matrix transpose of the normal equation coefficient matrix, [·] T is matrix transpose;
[0048] Normal equation coefficient matrix:
[0049]
[0050] Using the normal equation to obtain the undetermined coefficients, the equation of the elliptic contour curve is:
[0051] Ax 2 +Bxy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More