

Double-machine cooperative heavy-load stacking robot
A palletizing robot and robot technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as difficult to ensure effective clamping of workpieces, workpiece slippage, danger, etc., to ensure support ability and stability, and improve support ability , the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following will be combined with Figure 1-4 The present invention is described in detail, and the technical solutions in the embodiments of the present invention are clearly and completely described. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
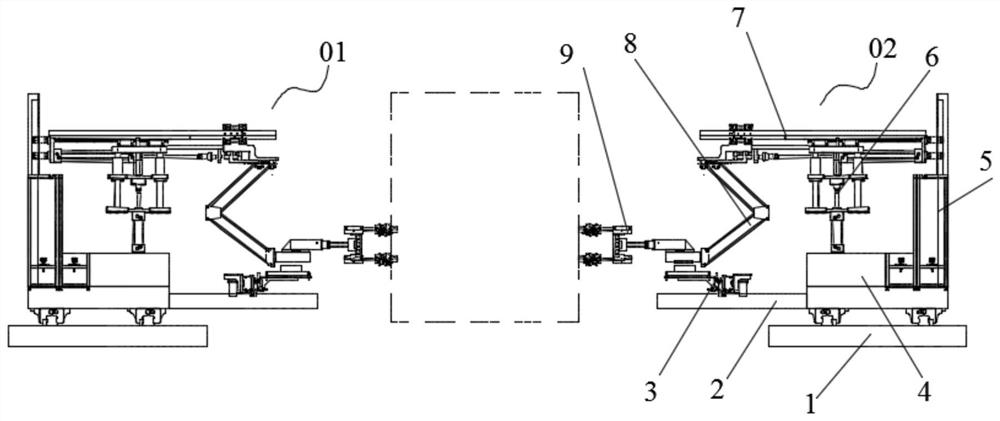
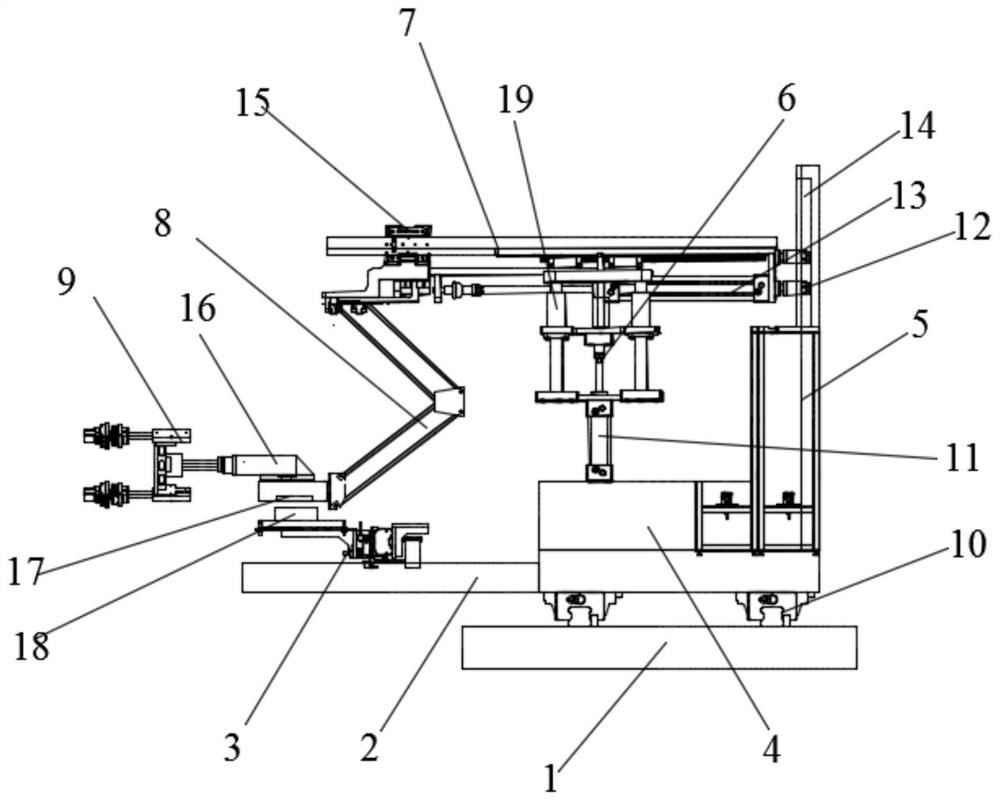
[0024] The present invention provides a dual-machine collaborative heavy-duty palletizing robot, which includes a first robot 01 and a second robot 02, wherein the first robot and the second robot are symmetrically arranged on opposite sides, and the The first robot 01 and the second robot 02 have the same structure, and both include a base 1, a longitudinal traversing seat 4, a locking bracket seat 5, a lifting mechanism 6, a horizontal beam 7, a m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More