

Flexible pneumatic finger and grabbing device
A pneumatic finger and flexible technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of small output force, loose structure of flexible starting fingers, and inability to bear large loads, etc., to achieve the effect of compact overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention provides a flexible pneumatic finger and a grasping device. In order to make the purpose, technical solution and effect of the present invention clearer and clearer, the present invention will be further described in detail below. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
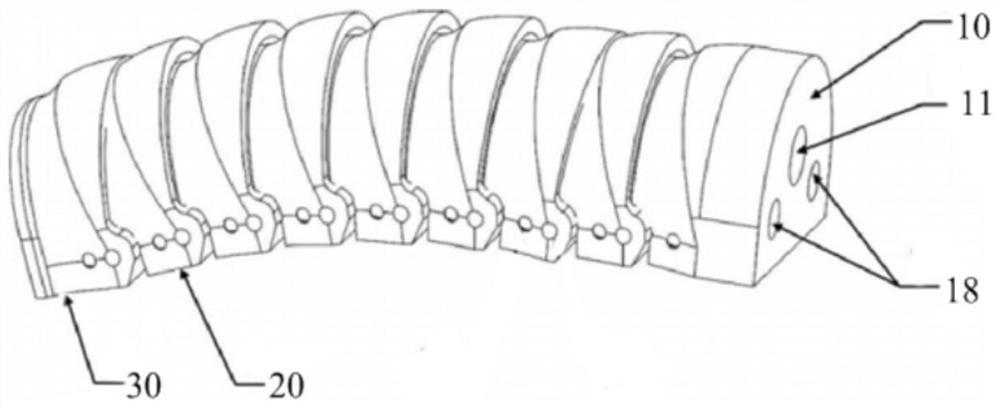
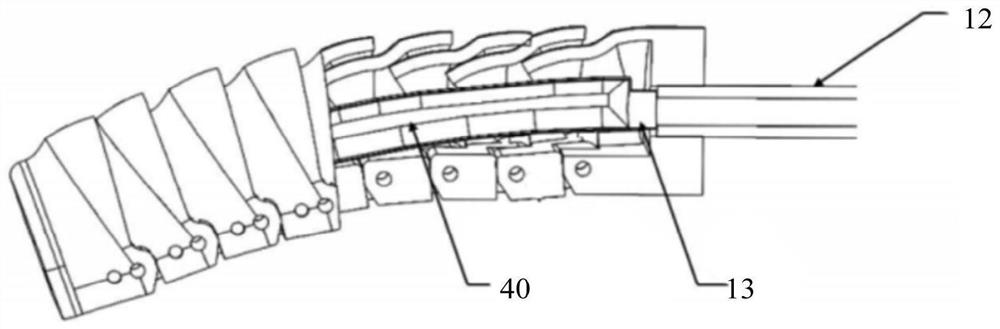
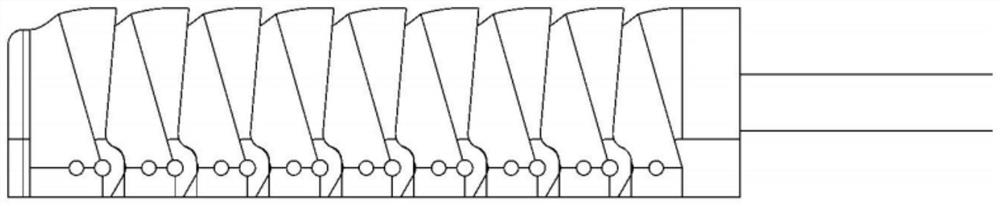
[0030] see figure 1 and figure 2 , the present invention provides a flexible pneumatic finger, as shown in the figure, it includes sequentially hinged first structural unit 10, several second structural units 20 and third structural units 30, the first structural unit 10, several The second structural unit 20 and the third structural unit 30 are hinged to form an internal cavity, and a latex airbag 40 is arranged in the internal cavity, and the latex airbag 40 passes through the ventilation hole provided on the first structural unit 10 11 is connected with trachea 12...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More