Self-attaching type movable supporting arm of wall-climbing robot
A wall-climbing robot and self-adhesive technology, which is applied in the directions of motor vehicles, transportation and packaging, can solve the problems of complex structure and inconvenient adjustment, and achieve the effect of ensuring normal walking operation, stability and good contact.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
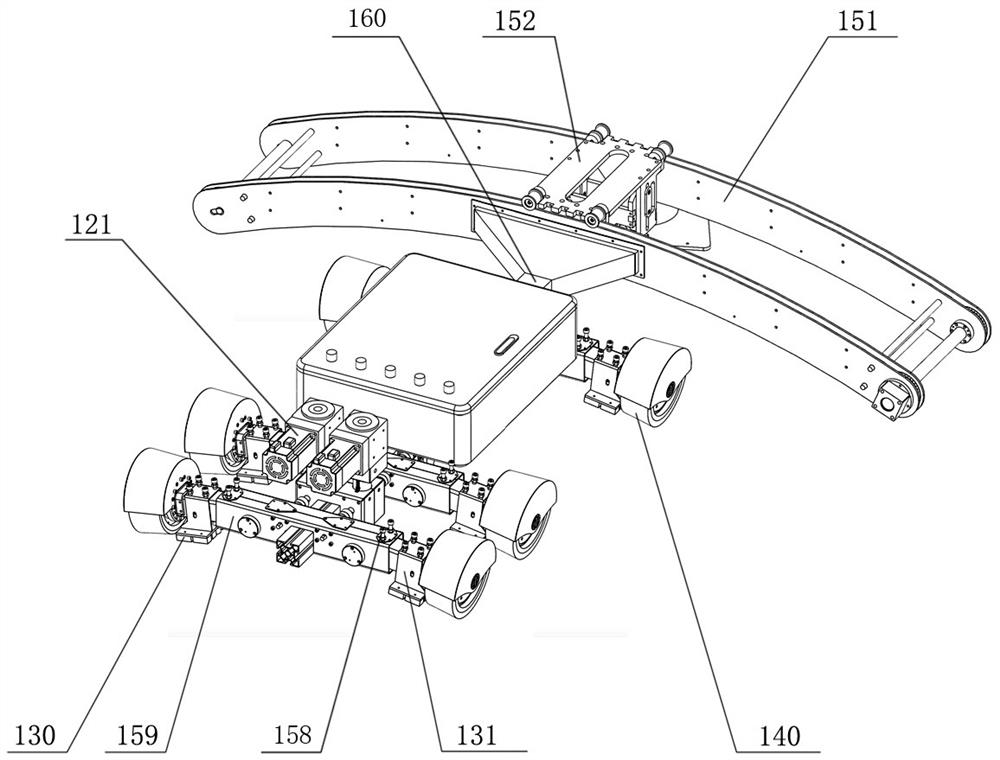
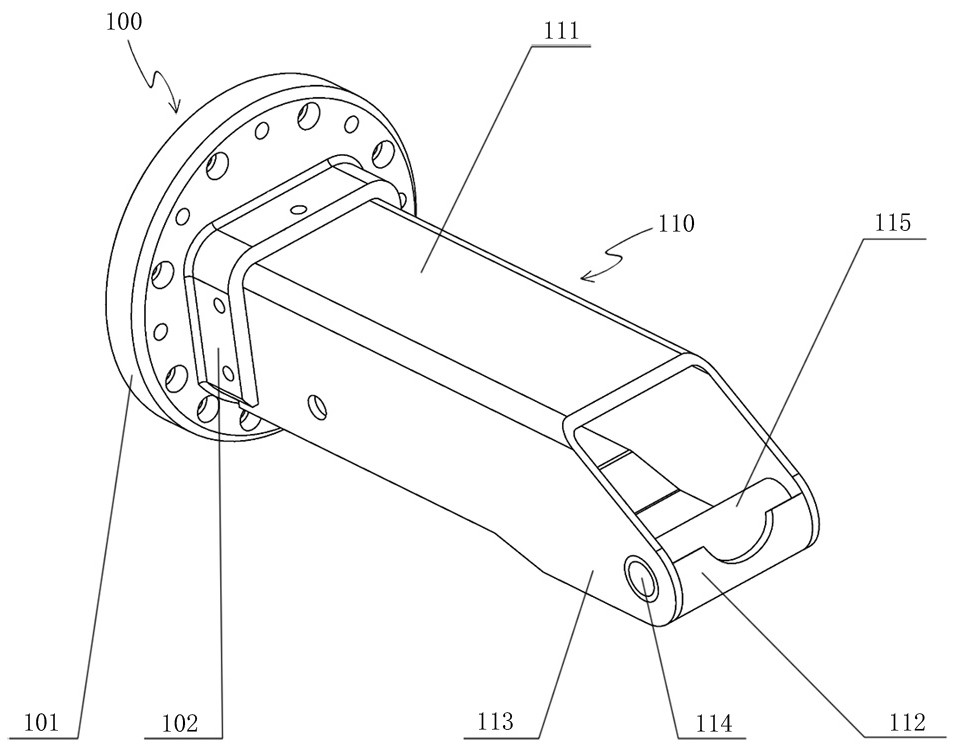
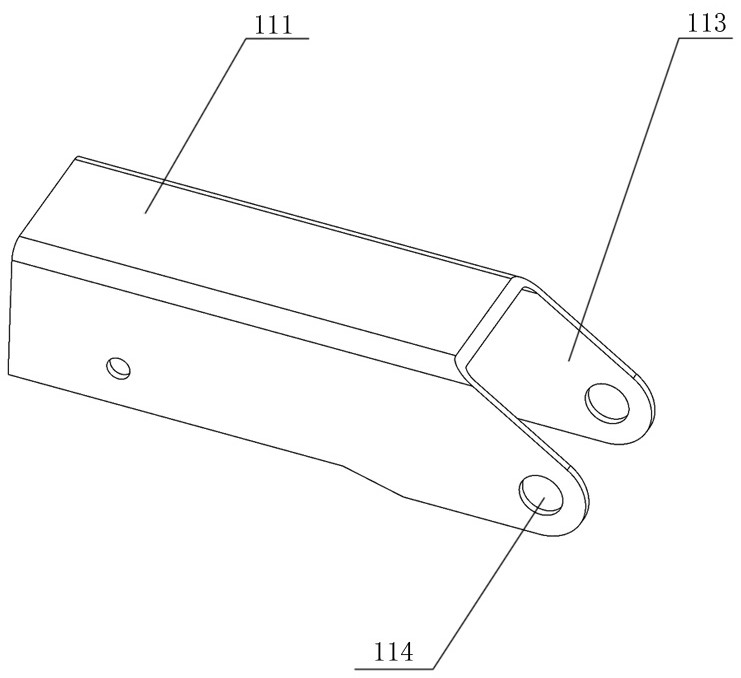
[0018] Such as figure 1 , figure 2 As shown, the present invention includes a support arm assembly and a wheel assembly 140 , the support arm assembly includes two components of the support arm body 110 and the connecting flange 100 . One end of the support arm body 110 is inserted into the horizontal casing 159 of the frame 160, and is hinged in the horizontal casing 159 of the frame through a pin, and the other end of the support arm body 110 is connected to the wheel assembly 140 through the connecting flange 100 . A fixed frame 131 is sleeved on the support arm body 110, and a support arm suction cup 130 is fixedly connected with the support arm suction cup 130 below the support arm body 110. Combined with the working face of the tower. The arm suction cup 130 is composed of a strong magnet arrangement and the suction surface is facing downward (that is, the working surface of the robot). The setting position of the arm suction cup 130 is when the movable arm is at the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More