

Underwater FM2 * path planning method fused with ocean current model
A path planning and ocean current technology, applied in vehicle position/route/altitude control, non-electric variable control, instruments, etc., to solve problems such as ocean current effects, limited sailing speed, and sub-optimal AUV planning paths
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
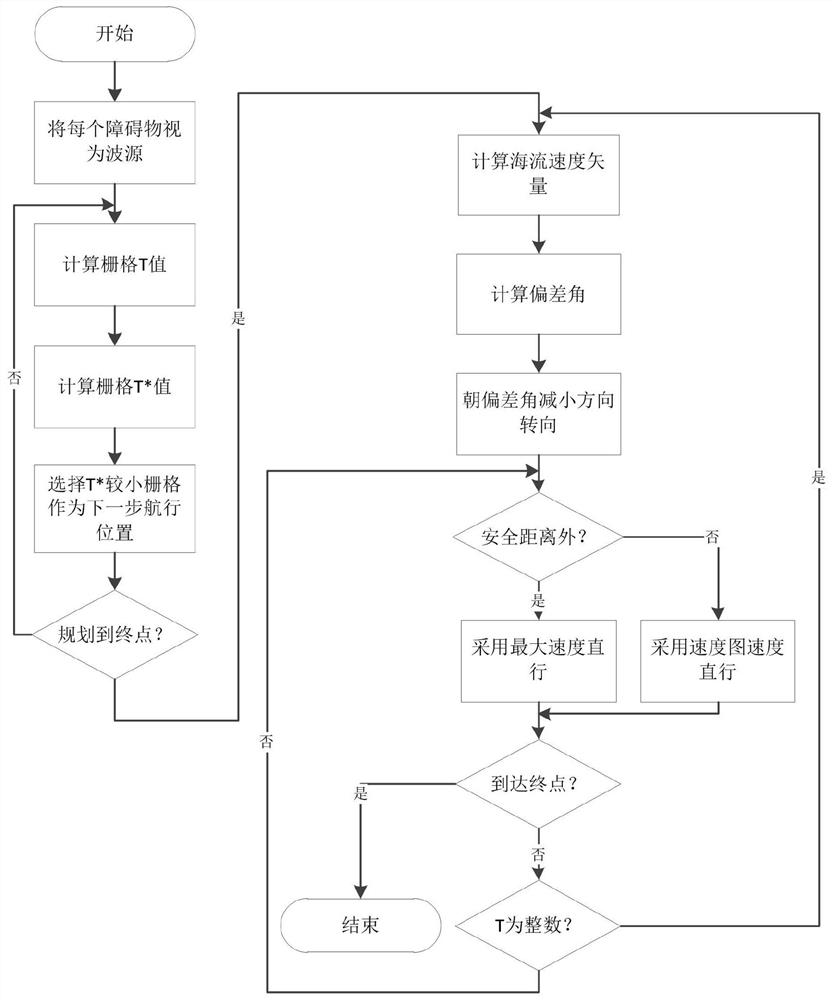
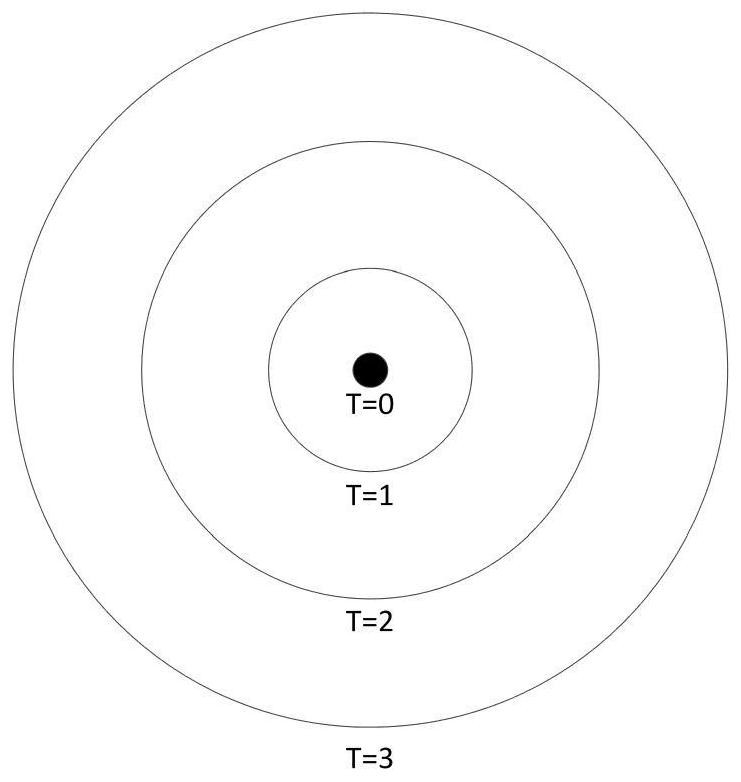
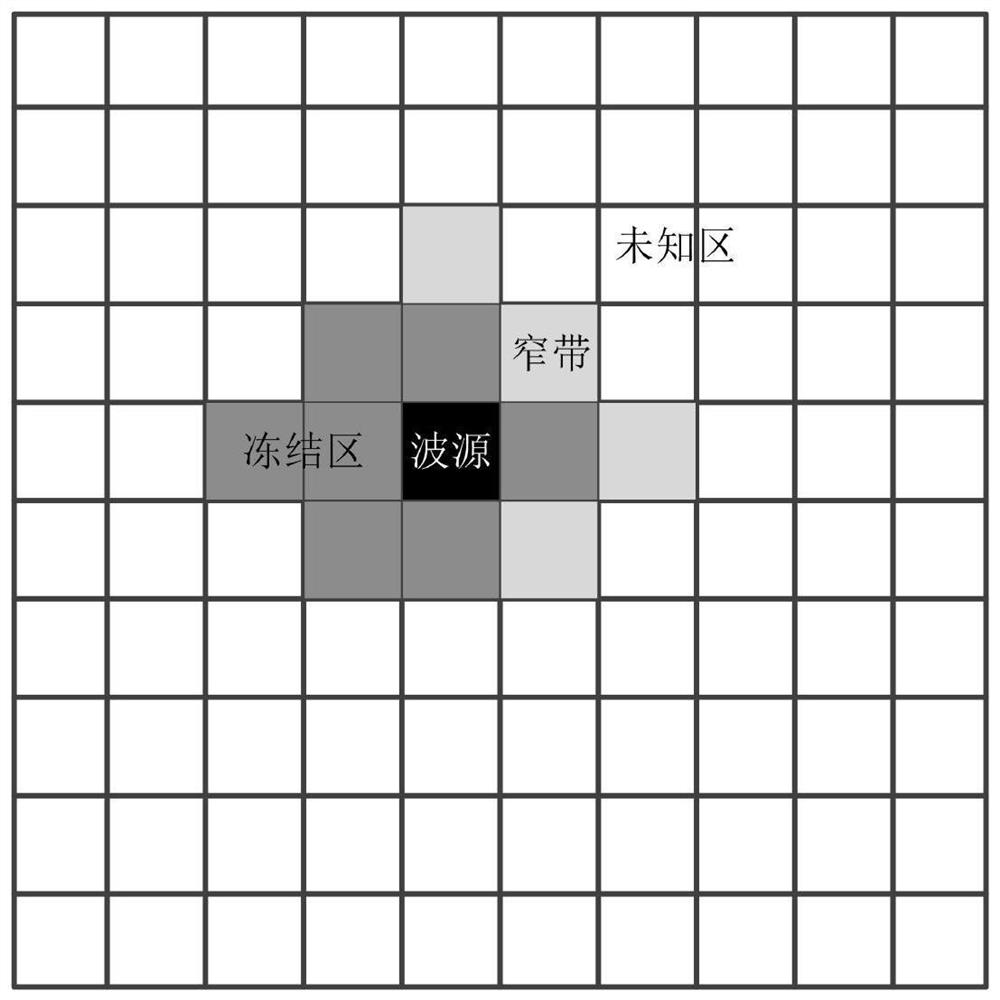
[0045] like figure 1 As shown, an underwater FM2* path planning method that integrates the ocean current model introduces the ocean current model on the basis of optimizing the FMM method, making the path planning method more suitable for the underwater environment. First, each obstacle is regarded as a wave source, and the grid T value is calculated by the Eikonal equation. The farther away from the obstacle, the larger the T value, such as figure 2 As shown; secondly, the T* value is calculated by combining the maximum allowable speed of the AUV, and then the path planning is carried out according to the FMM method, that is, the smaller T* value is selected as the next navigation direction each time; in this path, the points within the safe distance adopt The scaled speed of the potential field diagram of multi-source point wave expansion, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More