

Experimental platform of elephant-nose-imitated continuous robot
An experimental platform and robot technology, which is applied in the field of experimental platforms imitating elephant nose continuous robots, can solve the problem of inability to monitor the force of the manipulator and the data of space pose in real time, the difficulty of precise control of the flexible manipulator, and the inability to achieve high-precision grasping. To achieve the effect of good bending and rotation performance, small overall size and easy measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
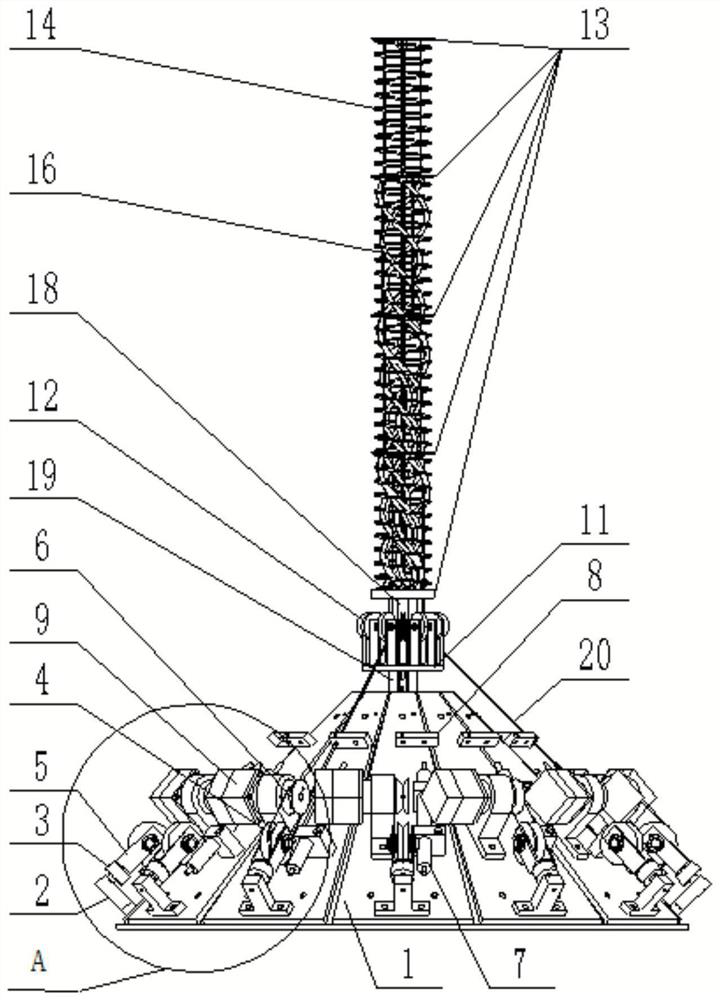
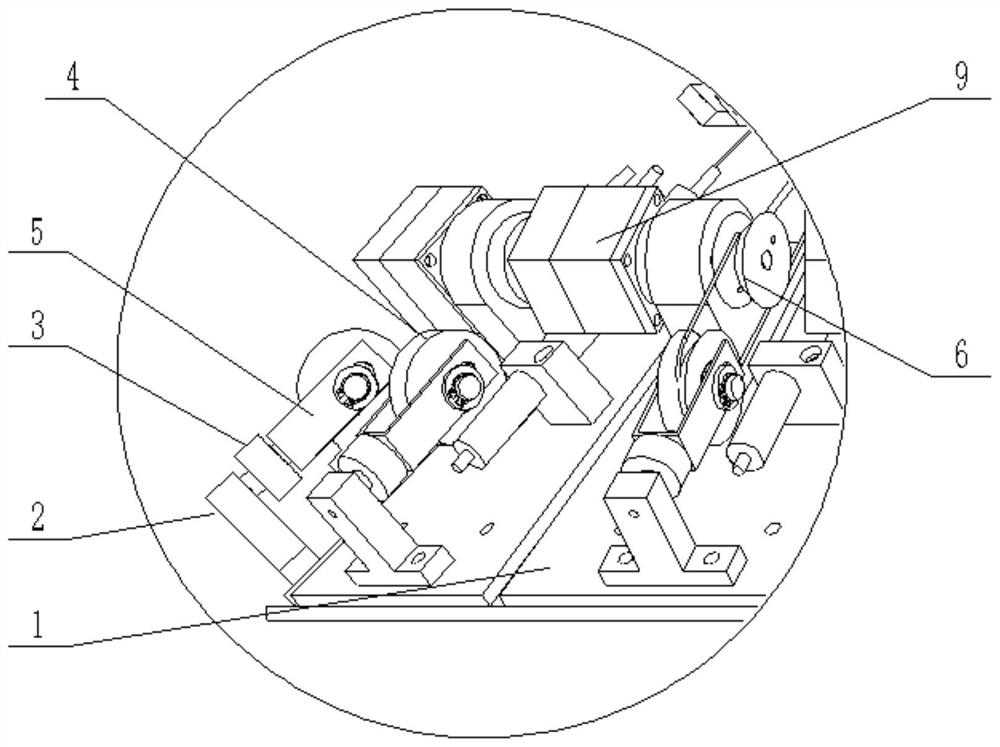
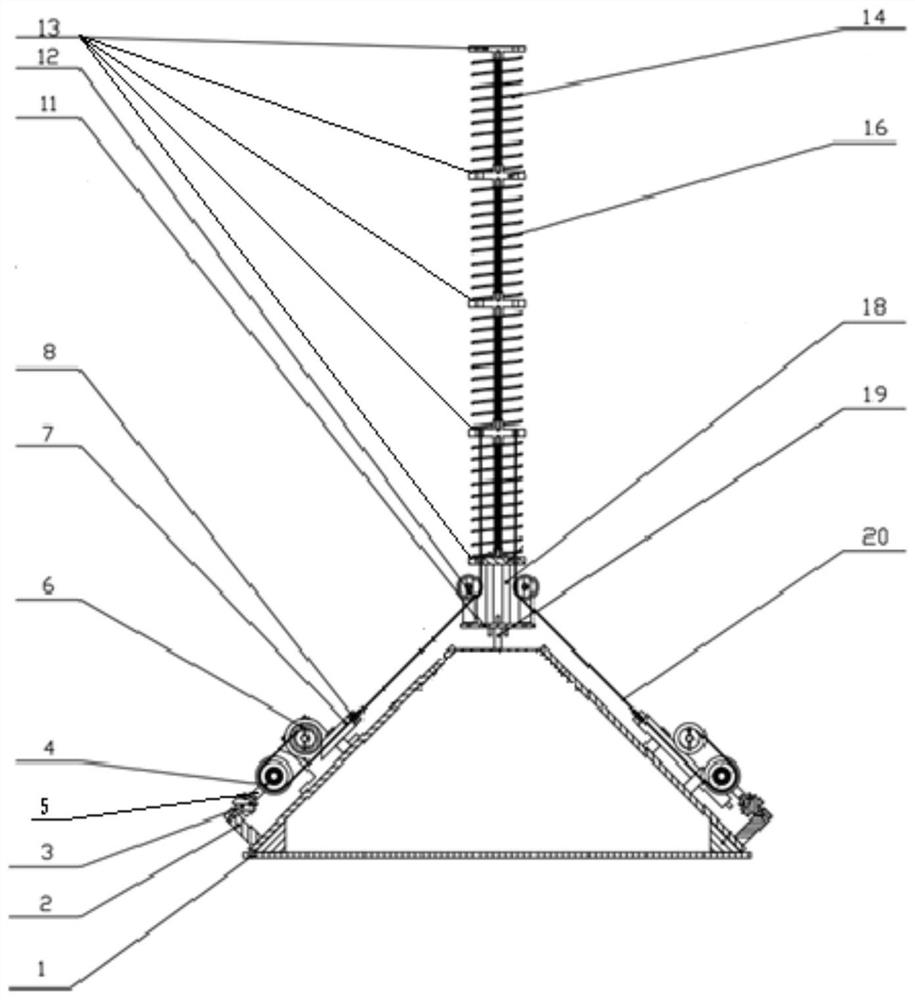
[0030] Refer Figure 1-4 , The present embodiment provides a continuous simulated robot elephant nose experimental platform, including a mounting table, disposed, driven by the drive mechanism driving mechanism mounted on the robot arm 1;
[0031] There are several sections including a robot arm manipulator, said manipulator each section are firmly fixed to the flexible support spring 16, spring flexible manipulator includes a support plate 14, 14 provided at both ends of the spring 13; embodiment according to the present embodiment, a flexible robot arm divided into four sections, from bottom to top of the first to the fourth flexible manipulator flexible manipulator;
[0032] The drive mechanism includes a plurality of drive assembly, each section flexible manipulator driven by three drive assembly, drive assembly to support the three centering springs 16 was 120 ° arranged on the mount 1.
[0033] A further preferred embodiment, the drive assembly includes a drive means, a first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More