

Bionic six-foot robotic exploration ant
A technology for robots and ants, applied in manipulators, motor vehicles, manufacturing tools, etc., can solve problems such as difficulty in taking into account stability and speed, inability to respond quickly, and inability to complete maneuvers, achieving ingenious structural design and low power consumption. , control the precise effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in detail below in conjunction with the accompanying drawings.
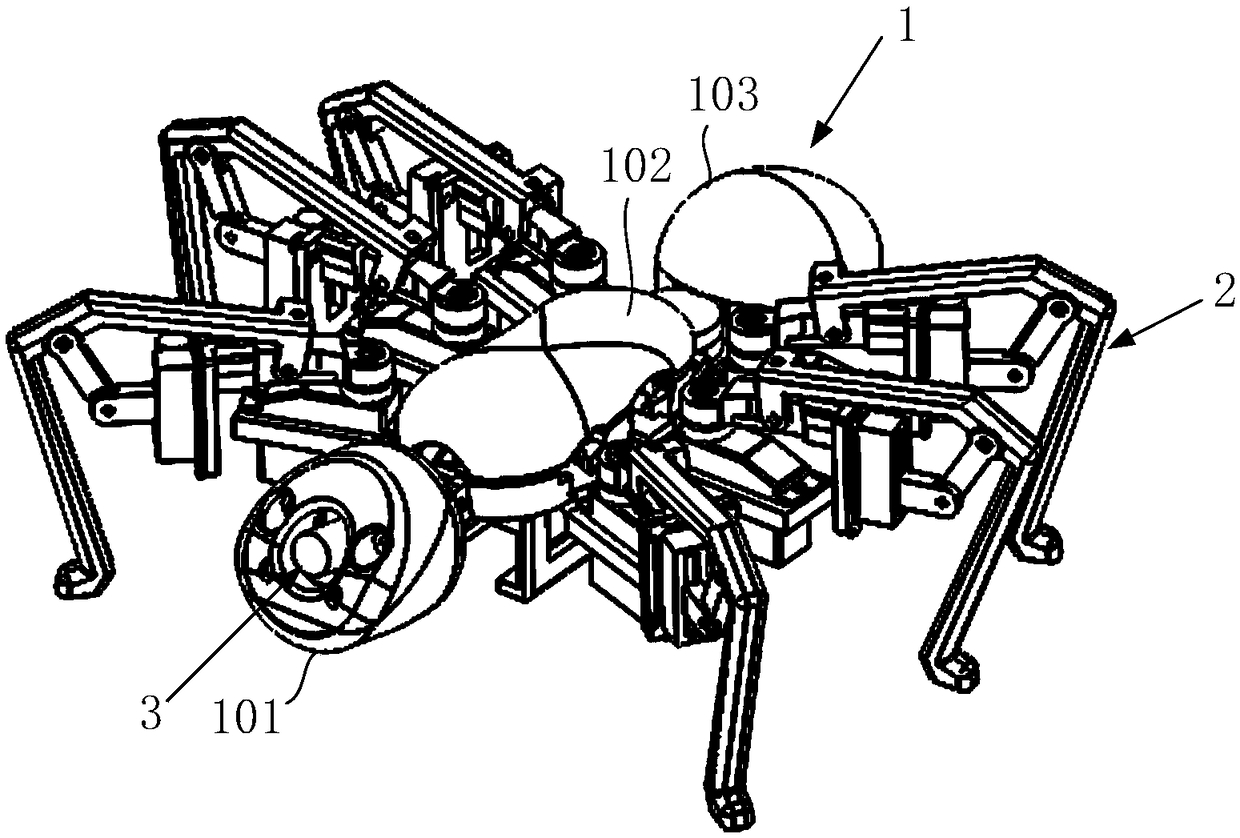
[0039] The bionic ant hexapod detection robot of the present invention comprises a main body part 1 and a hexapod part 2, such as figure 1 shown.
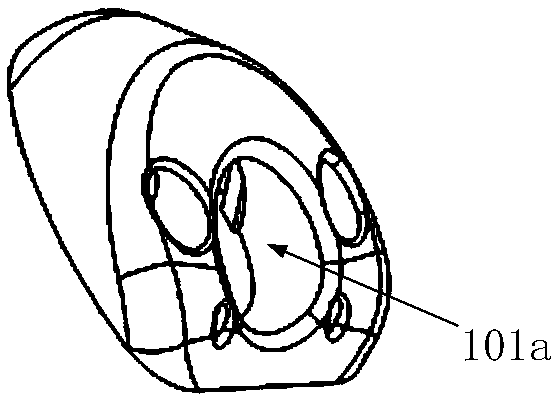
[0040] The main body part 1 includes a head 101 , a body 102 and a tail 103 . Wherein, the head 101 is divided into upper and lower parts; the front end of the upper part of the head 101 is designed with a camera head installation hole 101a, and the camera head is arranged inside it to realize the positioning of the camera 3 heads, as image 3 As shown; the lower part of the head 101 is designed with a camera support fixing groove 101b, and the camera support is clamped inside it to realize the fixing of the camera 3 supports, as Figure 4 shown. The upper part and the lower part of the head 101 are connected and fixed by M2 bolts passing through the screw fixing holes in the circumferential direction to form t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More