

Transverse control method and device based on steering, equipment and storage medium
A technology of lateral control and emergency steering, applied in two-dimensional position/channel control, non-electric variable control, control/regulation system and other directions, which can solve the problem of cumbersome operation for detecting large-scale steering.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
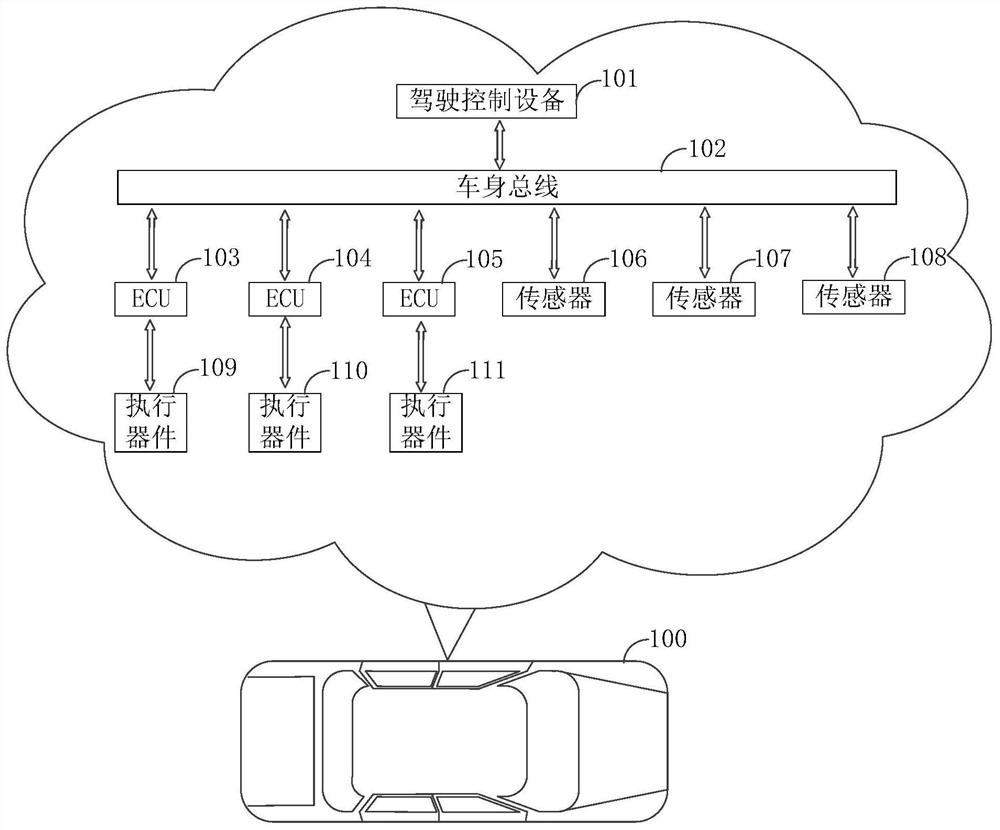
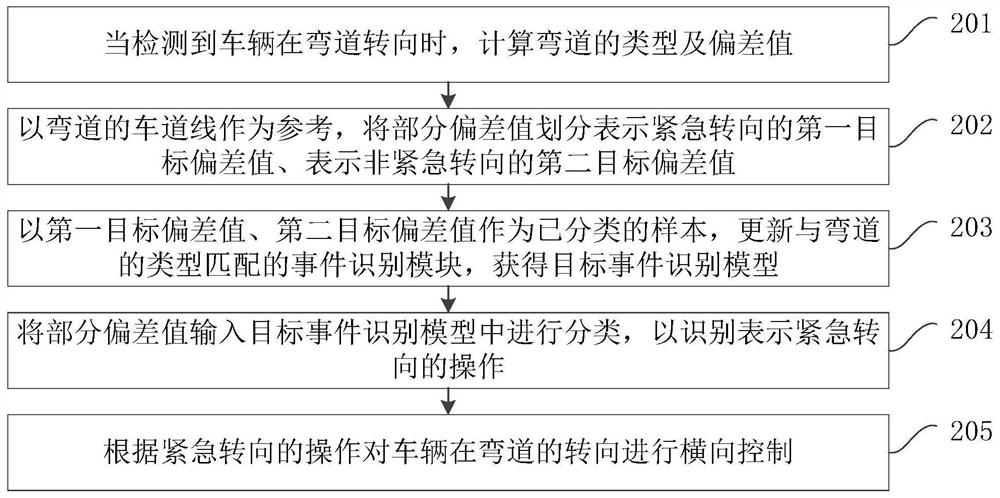
[0043] figure 2 It is a flow chart of a steering-based lateral control method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of adaptive user operation recognition emergency steering operation, and the method can be implemented by a steering-based lateral control device. Execution, the steering-based lateral control device can be implemented by software and / or hardware, and can be configured in computer equipment, for example, driving control equipment, etc., specifically includes the following steps:
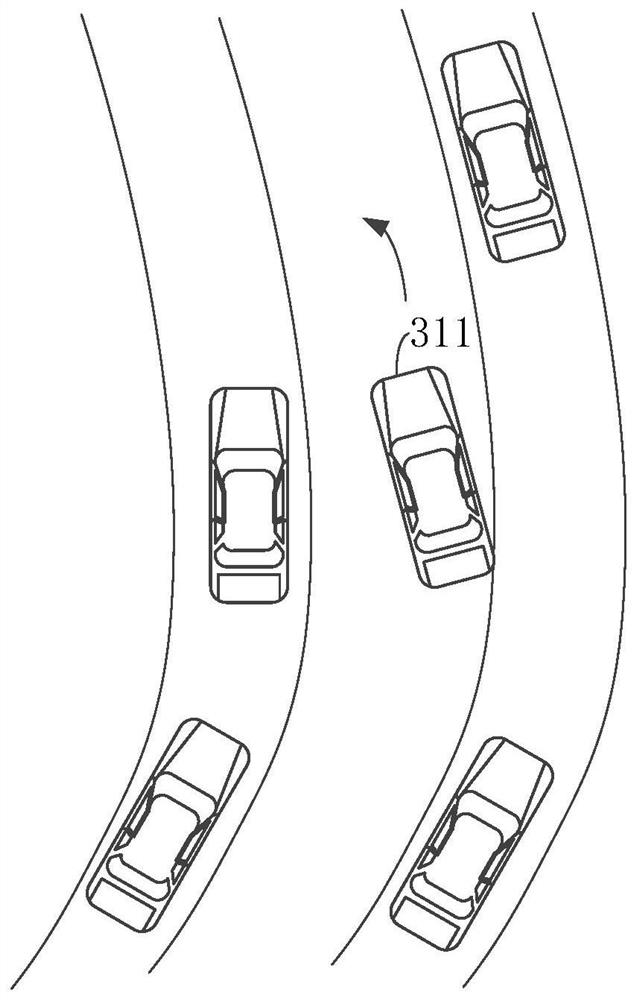
[0044] Step 201, when it is detected that the vehicle is turning on a curve, calculate the type of curve and the deviation value.
[0045] In this embodiment, when the user drives the vehicle, the automatic driving mode can be activated. The so-called automatic driving mode can refer to the mode in which the vehicle itself has environmental perception, path planning and autonomous vehicle control, that is, the vehicle is contr...
Embodiment 2
[0083] Figure 4It is a flow chart of a steering-based lateral control method provided by Embodiment 2 of the present invention. Based on the foregoing embodiments, this embodiment further refines the search event recognition model, trains the target event recognition model, and recognizes emergency steering. Operation, the method specifically includes the following steps:
[0084] Step 401, when it is detected that the vehicle is turning on a curve, calculate the type of curve and the deviation value.
[0085] Wherein, the deviation value represents the degree of the vehicle deviating from the standard direction.
[0086] Step 402 , taking the lane line of the curve as a reference, dividing part of the deviation value into a first target deviation value representing emergency steering and a second target deviation value representing non-emergency steering.
[0087] Step 403, look for an event recognition model trained for the type of curve.
[0088] In this embodiment, the...
Embodiment 3
[0179] Figure 7 The structural block diagram of a steering-based lateral control device provided in Embodiment 3 of the present invention may specifically include the following modules:
[0180] A deviation value calculation module 701, configured to calculate the type of the curve and the deviation value when it is detected that the vehicle is turning in a curve, the deviation value indicates the degree to which the vehicle deviates from the standard direction;
[0181] A deviation value division module 702, configured to use the lane line of the curve as a reference to divide part of the deviation value into a first target deviation value representing emergency steering and a second target deviation value representing non-emergency steering;
[0182] A target event identification model training module 703, configured to use the first target deviation value and the second target deviation value as classified samples, update the event identification module matching the type o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More