Robot moving path coverage rate measuring method and system
A technology of moving paths and measuring methods, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inefficiency, low precision, and difficulty in eliminating repeated paths, so as to improve accuracy and efficiency, and test work is simple, easy, and fast Measuring the effect of coverage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
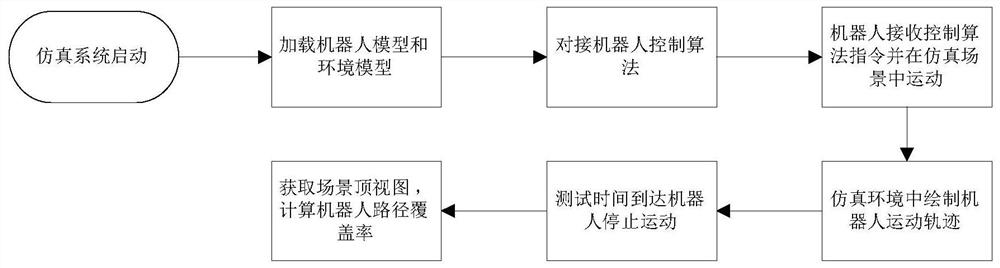
[0022] In order to make the present invention more comprehensible, preferred embodiments are described in detail below with accompanying drawings.
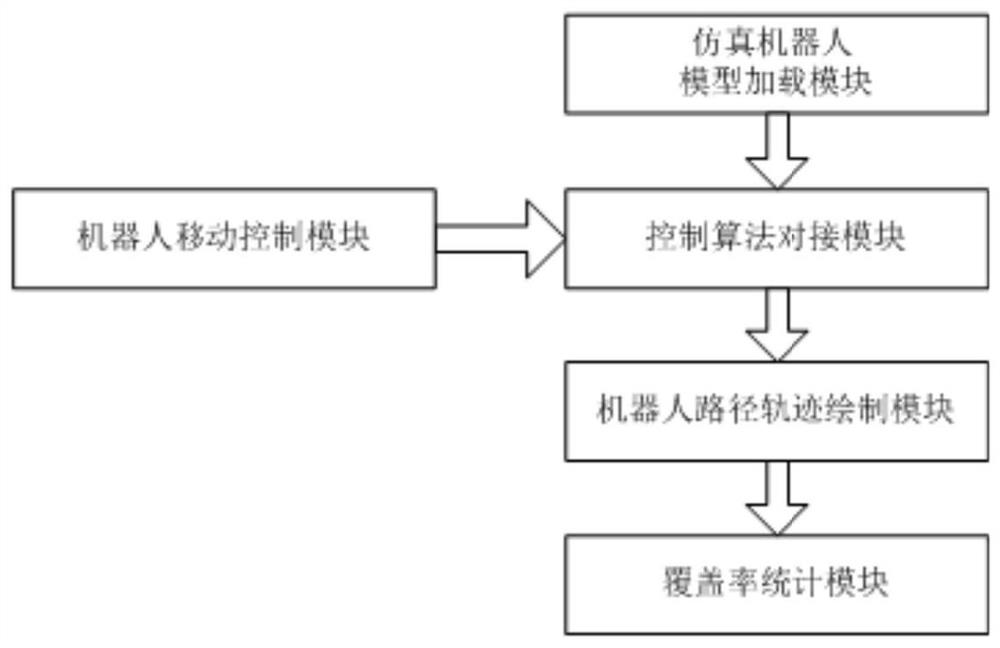
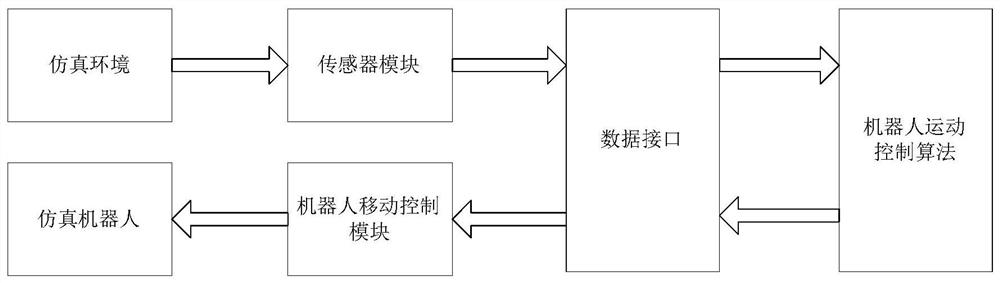
[0023] see image 3 , the technical solution adopted by a method for measuring the coverage rate of a robot moving path in the present invention is: build a robot model and a scene model in a simulation environment, and connect the robot movement control algorithm with the robot model in the simulation environment, so that the robot model can be completely in accordance with the real The control algorithm of the robot moves in the simulated environment. While the robot model is moving, draw its trajectory on the ground of the simulation environment, and the width of the trajectory is equal to the width of the robot model. After waiting for the robot model to move for a certain period of time, measure the coverage area of the robot model’s movement trajectory, and compare it with the actual total movable area of the scene mode...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More