

Positioning method of robot in hydraulic pipe culvert
A positioning method and robot technology, applied in the direction of instruments, using re-radiation, measuring devices, etc., can solve problems such as the disconnection of the controller, the failure of the detection results to correspond to the structure position, and the inability to know the exact position of the robot, so as to reduce interference. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
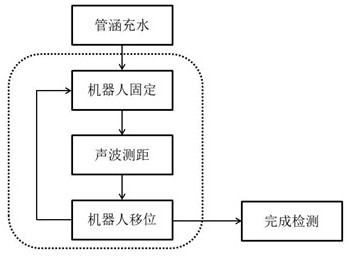
[0027] As shown in the figure, a positioning method for a robot in a hydraulic pipe culvert according to the present invention includes the following steps:
[0028] (1) Close the outlet of the pipe culvert, fill the inside of the pipe culvert with water, and start testing when the water fills the pipe culvert. At this time, the inside of the pipe culvert is basically completely filled with water. By controlling the opening of the inlet gate, etc., the flow field inside the pipe culvert is minimized. In this environment, the robot can use its own power (propeller) to hover and work at any height of the pipe culvert section.
[0029] (2) Set up two robots to work toge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More