

Robot joint synovial membrane control method and system based on neural network observer
A robot joint and neural network technology is applied in the field of robot joint synovial control based on a neural network observer, which can solve the problems that the robot joint system model is difficult to determine and the system state is difficult to measure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0065] This embodiment provides a method for controlling the synovial membrane of a robot joint based on a neural network observer. The method can be implemented by an electronic device, and the electronic device can be a terminal or a server.
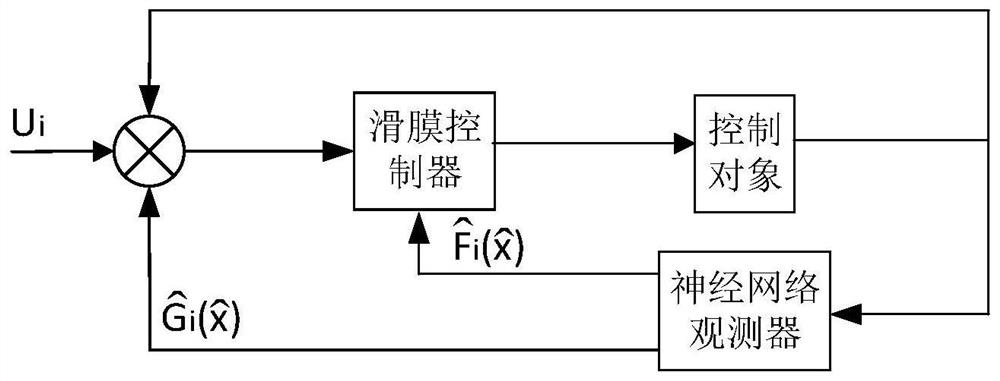
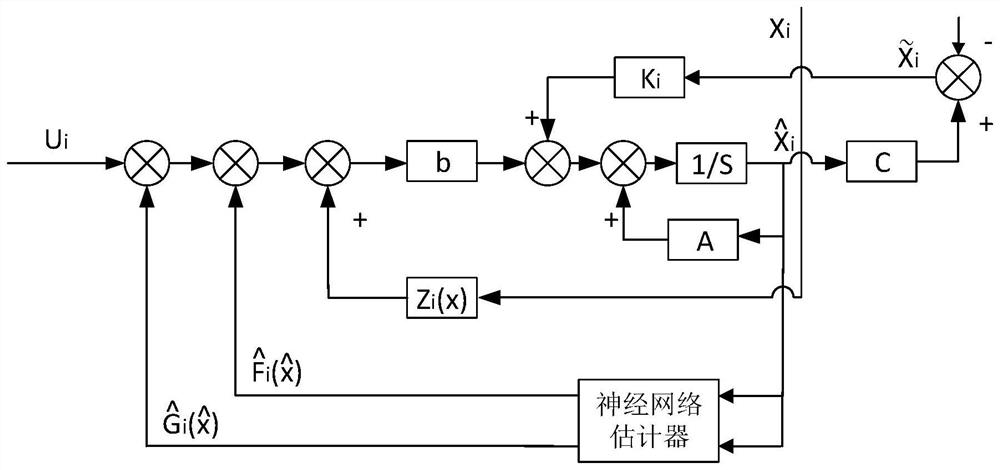
[0066] The method of this embodiment can track the ideal target of the system very well. Compared with the method of combining neural network and modern control, it also has a good control effect, and solves the problems that the robot system model is difficult to determine and the system state is difficult to measure. Many parameters of the robot joint system will change in actual work. The coupling relationship between subsystems and the existence of modeling errors, such as: inertia matrix, centrifugal force and Coriolis force items, and coupling of cross-linking items, lead to The model of the system is difficult to determine, so a synovial membrane control method based on neural network observer is designed. The RBF neural network...
no. 2 example
[0118] The present embodiment provides a robot joint synovium control system based on a neural network observer, and the robot joint synovium control system based on a neural network observer includes the following modules:
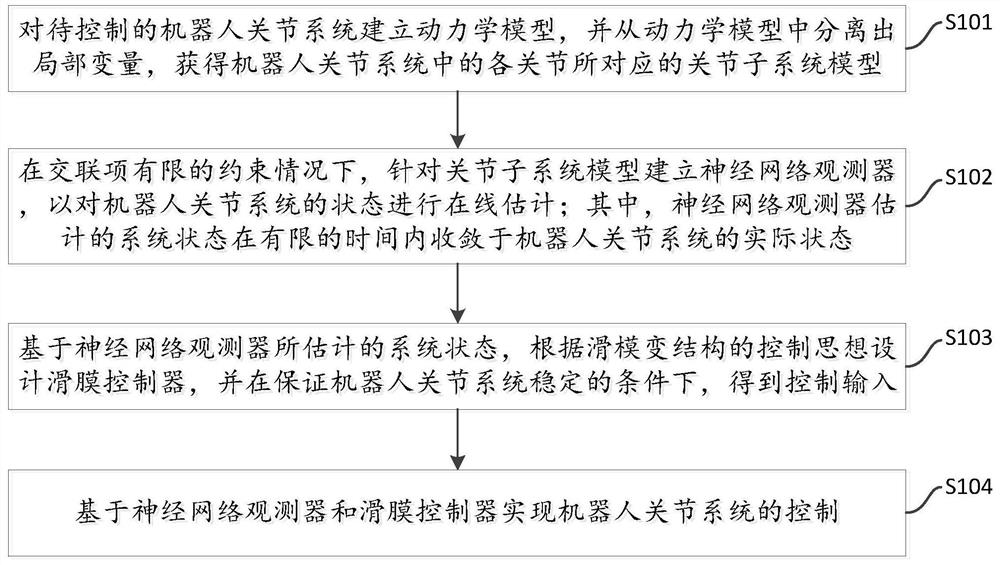
[0119] The joint subsystem model building module is used to establish a dynamic model of the robot joint system to be controlled, and separate local variables from the dynamic model to obtain the joint subsystem model corresponding to each joint in the robot joint system ;
[0120] The neural network observer building module is used to establish a neural network observer for the joint subsystem model constructed by the joint subsystem model building module under the constraint of limited cross-linking items, so as to monitor the state of the robot joint system performing online estimation; wherein the state of the system estimated by the neural network observer converges to the actual state of the robot joint system within a limited time;
[0121] The sy...
no. 3 example
[0125] This embodiment provides an electronic device, which includes a processor and a memory; at least one instruction is stored in the memory, and the instruction is loaded and executed by the processor, so as to implement the method of the first embodiment.
[0126] The electronic device may have relatively large differences due to different configurations or performances, and may include one or more processors (central processing units, CPU) and one or more memories, wherein at least one instruction is stored in the memory, so The above instructions are loaded by the processor and perform the following steps:
[0127] S101, establishing a dynamic model of the robot joint system to be controlled, and separating local variables from the dynamic model, to obtain a joint subsystem model corresponding to each joint in the robot joint system;
[0128] S102, under the constraints of limited cross-linking items, establish a neural network observer for the joint subsystem model to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More