

Turning control method, device and system of unmanned mobile device and storage medium
A technology of turning control and moving device, applied in control/adjustment system, non-electric variable control, two-dimensional position/channel control and other directions, which can solve the problems of long time, complicated process and action, which will affect production efficiency, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
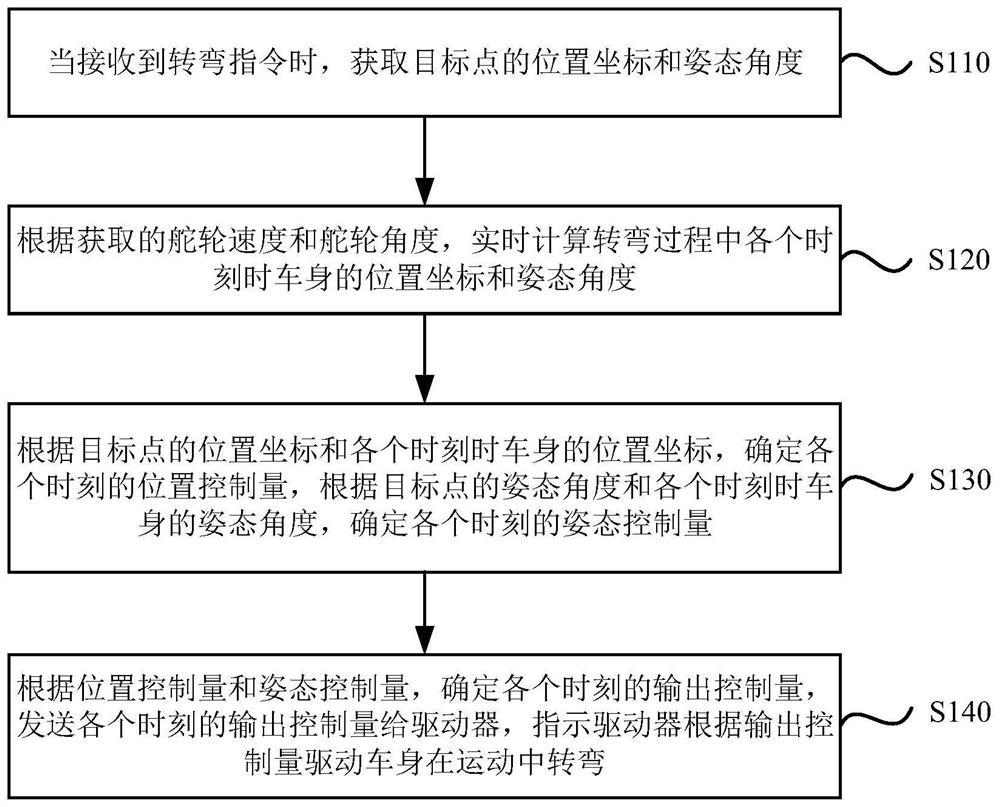
[0034] figure 1 It is a flow chart of a turning control method for an unmanned mobile device provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of turning control of an unmanned mobile device based on optical navigation, and the method can be executed by a turning control device , the device may be implemented in software and / or hardware. The device can be configured in an unmanned mobile device. Such as figure 1 As shown, the method includes:
[0035] Step S110, when a turning command is received, acquire the position coordinates and attitude angle of the target point.
[0036] Specifically, when the turning controller receives the turning instruction, it acquires the position coordinates and attitude angle of the target point from its own memory, and starts to enter the turning control process. Wherein, the turning instruction may be sent to the turning controller by the scheduling system, for instructing the turning control...
Embodiment 2
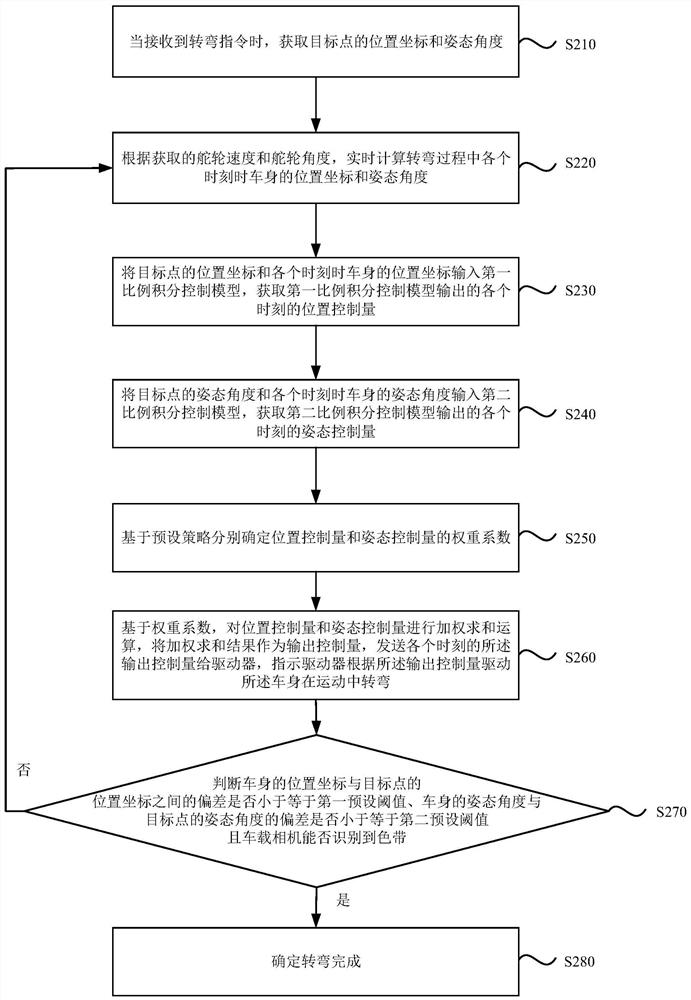
[0050] figure 2 It is a flow chart of a turning control method for an unmanned mobile device provided in Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above embodiments, as shown in figure 2 As shown, the method includes:
[0051] Step S210, when a turning command is received, acquire the position coordinates and attitude angle of the target point.
[0052] Step S220 , according to the acquired steering wheel speed and steering wheel angle, calculate the position coordinates and attitude angles of the vehicle body at each moment in the turning process in real time.
[0053] Step S230, input the position coordinates of the target point and the position coordinates of the vehicle body at each time into the first proportional-integral control model, and obtain the position control amount at each time outputted by the first proportional-integral control model.
[0054] Specifically, the turning controller inputs the position coordinate...
Embodiment 3
[0073] Figure 4 It is a flow chart of a method for real-time calculation of the position coordinates and attitude angles of the vehicle body at various moments in the turning process provided by Embodiment 3 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiments, as Figure 4 As shown, according to the obtained steering wheel speed and steering wheel angle, the real-time calculation of the attitude angle of the vehicle body at each moment in the turning process can be implemented in the following ways:
[0074] Step S221, acquiring the initial attitude angle of the vehicle body when receiving the turning instruction.
[0075] Specifically, when the turning controller receives the turning instruction, it acquires the attitude angle of the vehicle body at the current moment as the initial attitude angle.
[0076] Step S222 , according to the wheelbase of the vehicle body, the steering wheel speed and the steering wheel angle at e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More