

Lane Keeping Assist System Considering Vehicle Hazardous State Under Human-Machine Cooperative Control
A lane keeping and dangerous state technology, applied in the field of advanced assisted driving of smart cars, can solve problems such as untimely control, failure to consider vehicle stability constraints, lack of smooth transfer of control rights, etc., to ensure driving safety and reduce man-machine conflicts Effect
Active Publication Date: 2022-07-15
DALIAN UNIV OF TECH
View PDF6 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
In terms of vehicle state, this method only considers the road safety constraints, but does not consider the vehicle stability constraints, and cannot perform timely control when the vehicle is unstable.
In addition, when the driver is tired or distracted, the control right is directly transferred from the driver to the automatic controller, which lacks a smooth transfer between the control rights, and human-machine conflicts are likely to occur
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
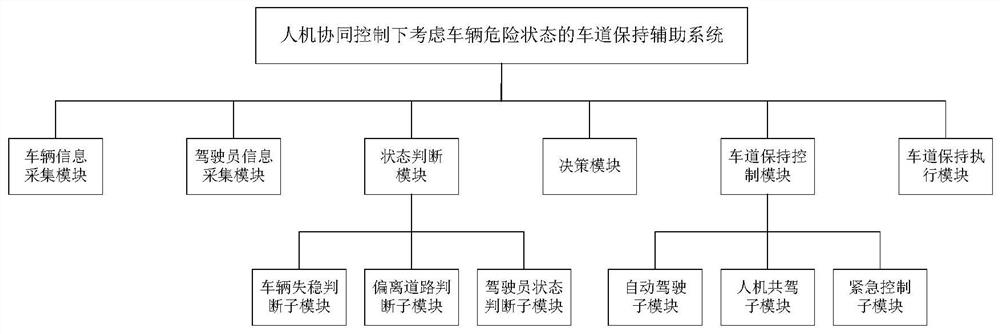
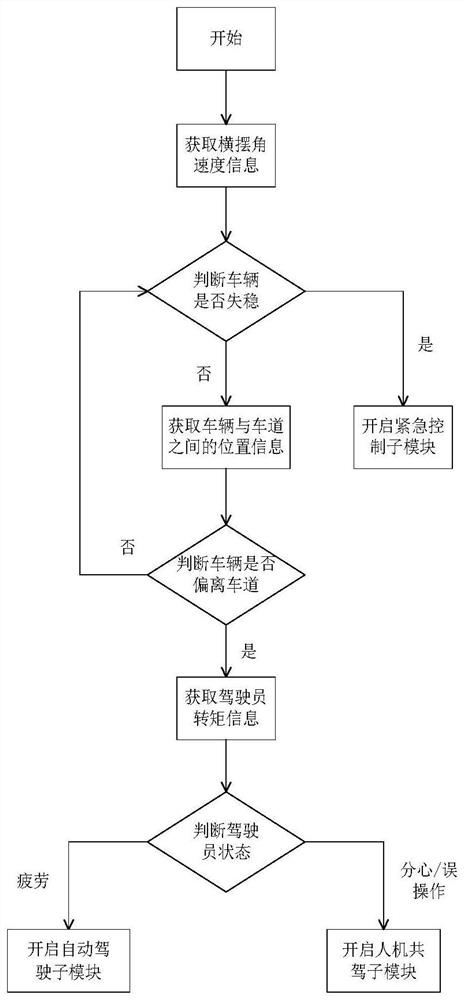
[0033] The present invention will be further described below with reference to the accompanying drawings. The specific components of a lane keeping assist system that considers the dangerous state of the vehicle under the cooperative control of human and machine are as follows: figure 1 As shown, the working method of a lane keeping assist system considering the dangerous state of the vehicle under the cooperative control of man-machine is as follows: figure 2 shown.
[0034] The present invention is not limited to this embodiment, and any equivalent ideas or changes within the technical scope disclosed in the present invention are included in the protection scope of the present invention.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention discloses a lane keeping assisting system under human-machine cooperative control considering the dangerous state of the vehicle, comprising a vehicle information collection module, a driver information collection module, a state judgment module, a decision module, a lane keeping control module and a lane keeping execution module. The decision-making module of the present invention comprehensively considers the state of the driver and the state of the vehicle, so as to accurately determine whether the driver and the vehicle are in a dangerous state in real time, so as to make a decision. When the vehicle becomes unstable, the emergency control sub-module of the present invention immediately actively controls the vehicle to control the vehicle in a stable state. When the vehicle is not unstable and deviates from its own lane, if the driver is in a fatigued state, the automatic driving sub-module of the present invention can ensure that the control system intervenes smoothly to the maximum extent on the driving trajectory of the vehicle, thereby ensuring the driving safety of the vehicle. If the driver is in a state of distraction or misoperation, the man-machine co-driving sub-module of the present invention is used to assist the driver and reduce man-machine conflict.
Description
technical field [0001] The invention relates to the field of advanced assisted driving of intelligent vehicles, in particular to a lane keeping assist system which considers the dangerous state of the vehicle under the cooperative control of man and machine. Background technique [0002] The issue of road traffic safety has aroused widespread concern, and a large number of traffic accidents are caused by the vehicle deviating from the lane due to driver fatigue or distraction. The traditional lane keeping assist control system mostly regards the driver's input as the disturbance, and uses the control algorithm to build the vehicle road model. Since this control system fails to better adapt to the driver, the driver is prone to conflict with the system, reducing the driver's acceptance of the system. The dynamic cooperative control can dynamically adjust the driving weight between the driver and the automatic controller according to the changes of the vehicle environment, so...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): B60W30/12B60W50/00B60W10/20B60W30/02B60W40/08
CPCB60W30/12B60W50/0098B60W10/20B60W30/02B60W40/08B60W2040/0818B60W2040/0863
Inventor郭烈秦增科赵剑岳明刘蓬勃马跃
OwnerDALIAN UNIV OF TECH