Bionic underwater robot capable of swimming and walking by being driven based on same mechanism and control method of bionic underwater robot
An underwater robot and bionic technology, which is applied in the direction of motor vehicles, underwater ships, underwater operation equipment, etc., can solve the problems of large size, complex mechanism, and lower reliability of robots, and achieve low cost, simple structure, and easy lifting to overcome obstacles. Effects of Ability and Terrain Adaptation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] (1) Detailed description
[0040] The present invention is a bionic underwater robot driven to walk based on the same mechanism and its operating method. The embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
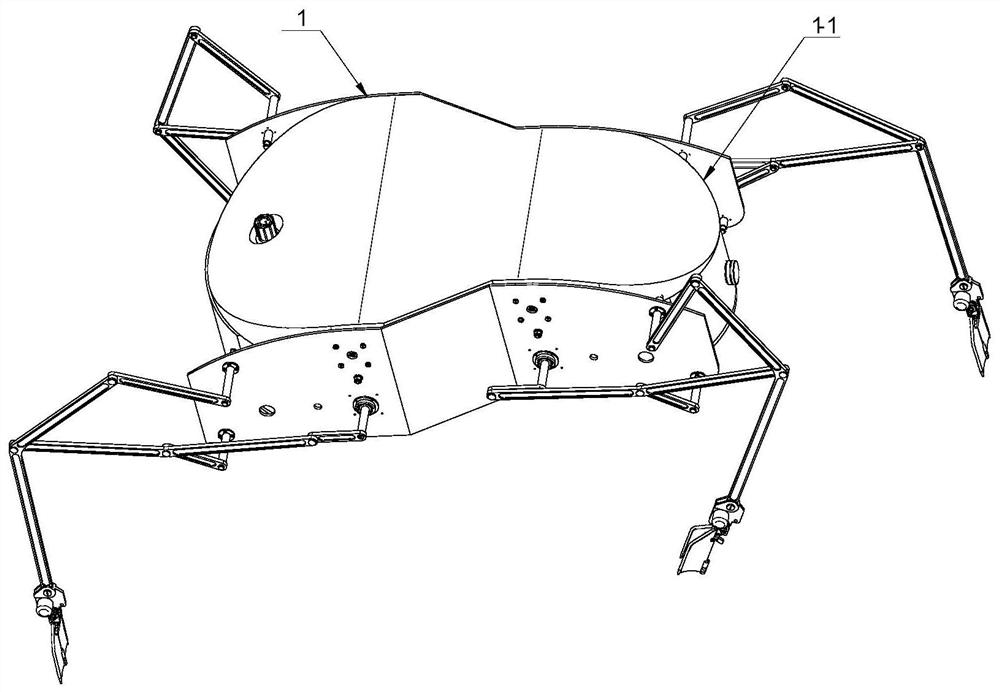
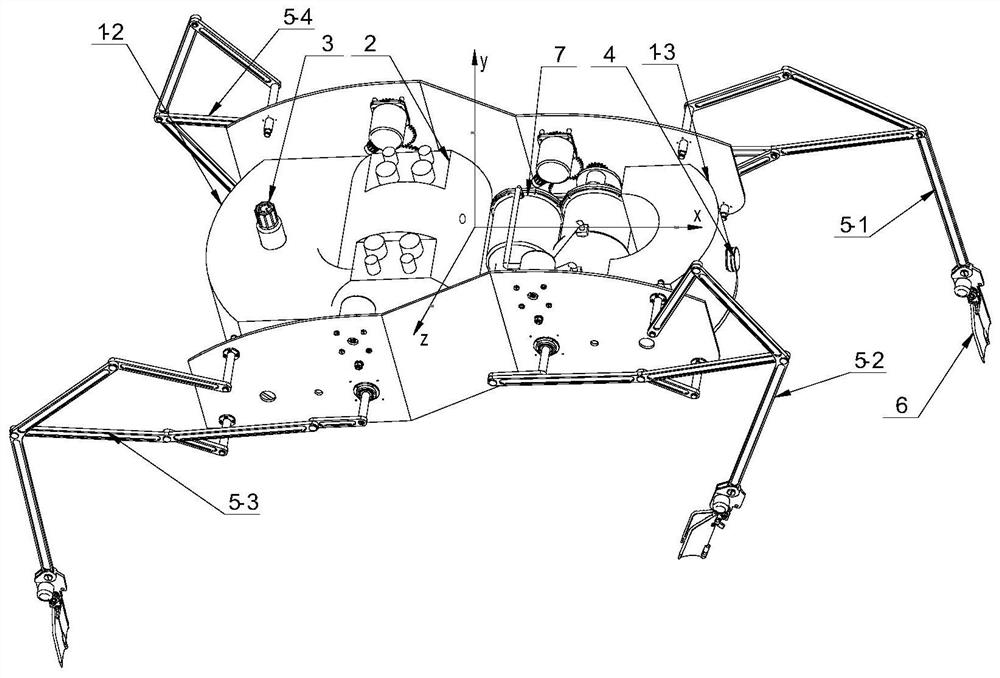
[0041] refer to figure 1 and figure 2 , a bionic underwater robot driven by the same mechanism, including a shell 1, a control sealed cabin 2, an integrated depth and height sensor 3, a vision device 4, a bionic quadruped walking device 5, and a bionic duck web 6 , Buoyancy regulating device 7.
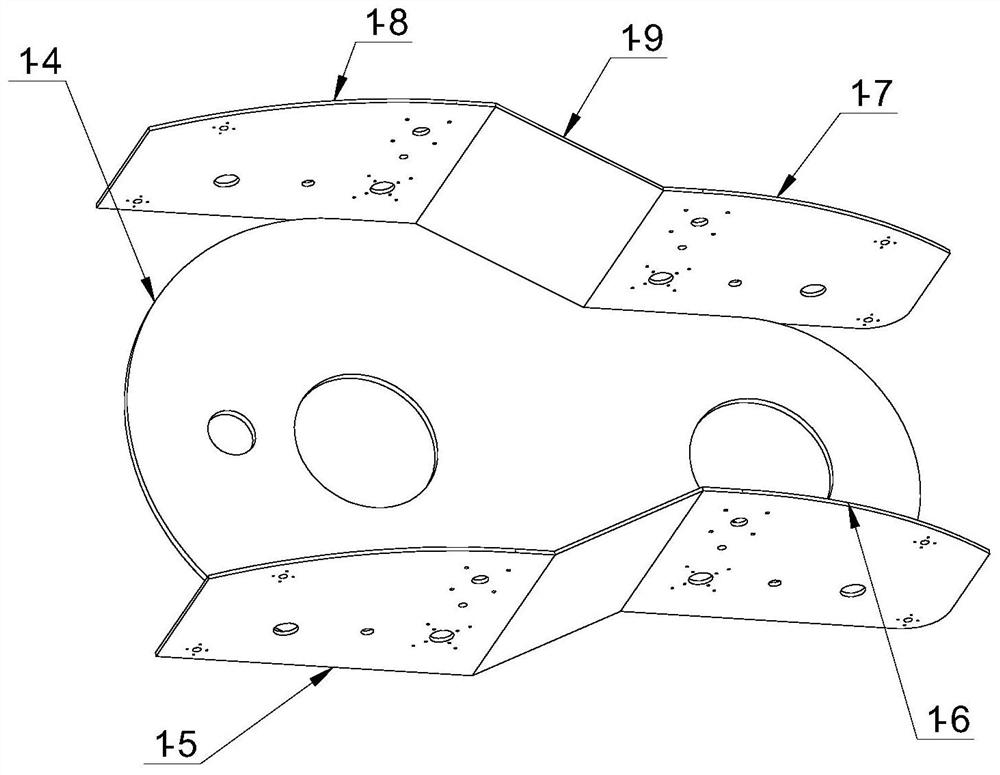
[0042] refer to figure 2 , in order to accurately describe the embodiment of the present invention, a coordinate system is established in the embodiment of the present invention. Wherein, the origin O is the bottom plate 1-4 of the housing 1 (see image 3 ) on any point. The XOZ plane is the horizontal plane of the ground coordinate system; the X axis is the forward direction of the robot, such as "...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com