

Unmanned aerial vehicle perception avoidance capability detection and evaluation system and method
A technology of unmanned aircraft and evaluation system, applied in the field of detection and evaluation system of unmanned aircraft perception and avoidance ability, can solve the problems of inaccurate information, low test efficiency, lack of detection and evaluation system, etc., to reduce interference, improve detection accuracy and Efficiency, the effect of overcoming the influence of environmental factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions in the embodiments of the present application will be described below with reference to the drawings in the embodiments of the present application.
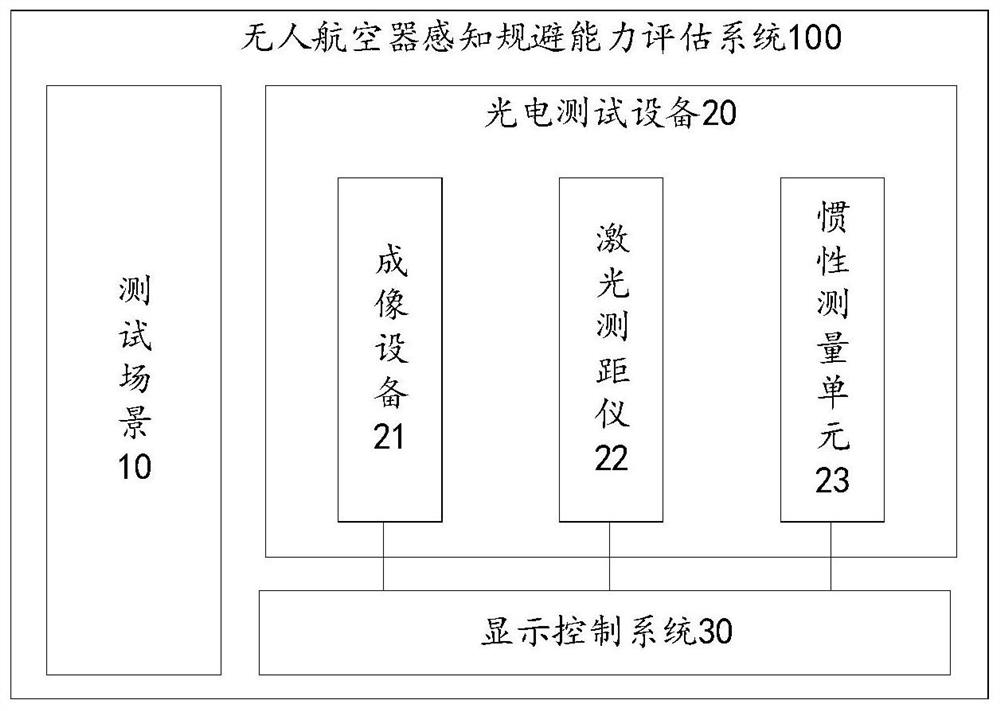
[0032] see figure 1 , the embodiment of the present application provides a detection and evaluation system 100 for the detection and avoidance capability of an unmanned aerial vehicle, including a test scene 10 , an optoelectronic test device 20 and a display control system 30 .
[0033] Among them, the test scene 10 can be set with various encounter models. Different obstacles are set in each encounter model. The obstacle can be an obstacle in motion or a stationary obstacle. When setting up the encounter model, you can build a corresponding encounter model according to the purpose of the UAV. For example, if the UAV is suitable for forest fire inspection, the encounter model can be constructed as a forest model; The model can be constructed as an urban traffic module. For the test of the perce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More