

Robot falling protection method and system based on impact prediction and active compliance
A robotic and active technology, applied in the field of information science, can solve problems such as reducing the effect of active adaptation, and achieve the effect of enhancing adaptability, reducing parameter space, and simplifying design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be noted that the following embodiments are intended to facilitate the understanding of the present invention, but do not limit it in any way.
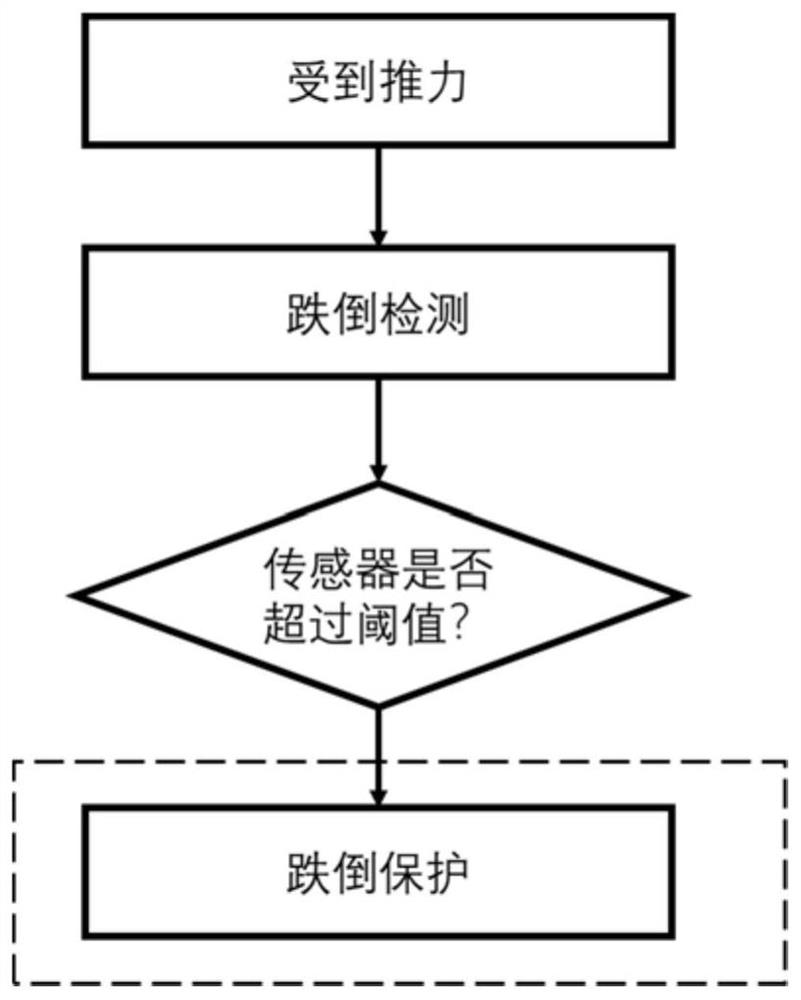
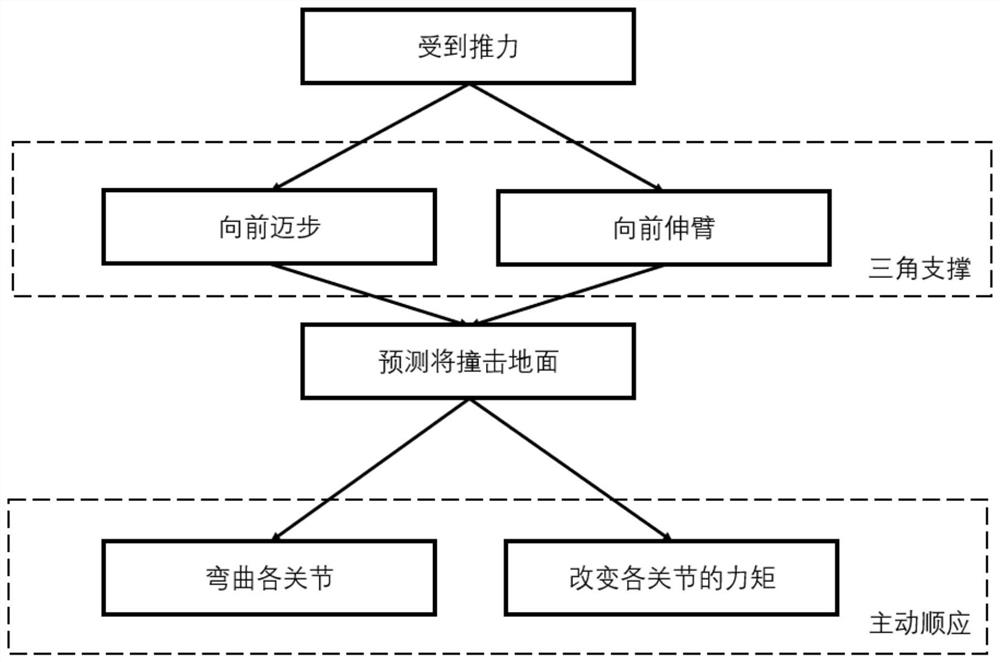
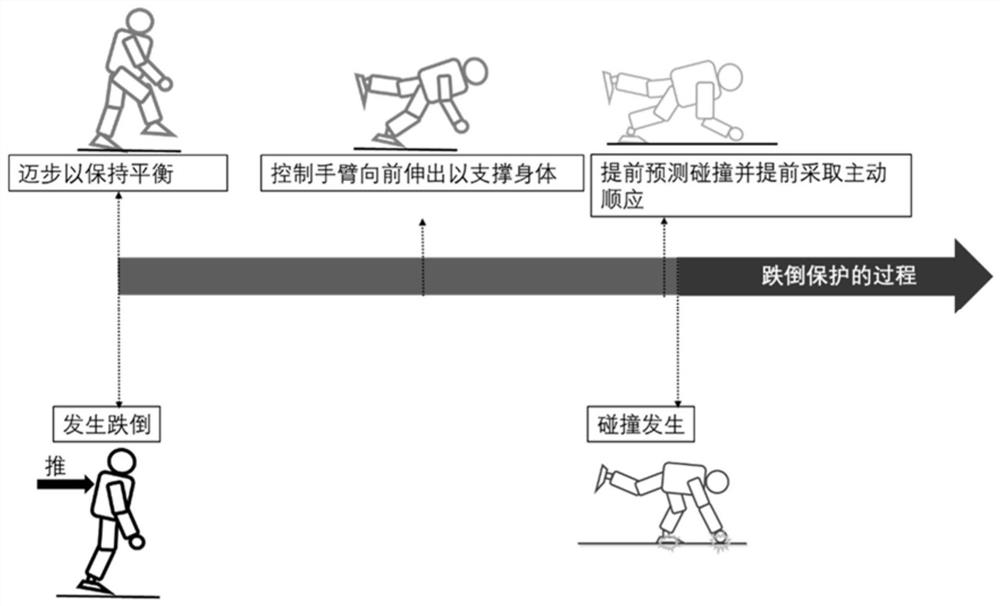
[0048] Such as figure 1 As shown, the robot fall protection system includes a fall detection module and a fall protection module. The specific composition of the fall protection module is as follows: figure 2 As shown, the movement process of fall protection is as follows image 3 shown.
[0049] The robot fall protection method of the present invention comprises a model training stage and a model application stage:
[0050] Model training phase:
[0051] (1) Design a mapping model from the sensor value of the robot to the motion control parameters, called the fall protection control model. The output of the fall protection control model contains multiple motion control parameters, so that ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More