

A Large Stroke Clamping Mechanism with Adaptive Brick Scale
A scale-adaptive, clamping mechanism technology, applied in building construction, building material processing, construction, etc., can solve problems such as inability to build the highest layer of the wall, failure to clamp bricks, unfavorable clamping operations, etc. , to achieve the effect of good clamping operation, compact structure and strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to deepen the understanding of the present invention, the present invention will be further described below in conjunction with the examples, which are only used to explain the present invention, and do not constitute a limitation to the protection scope of the present invention.
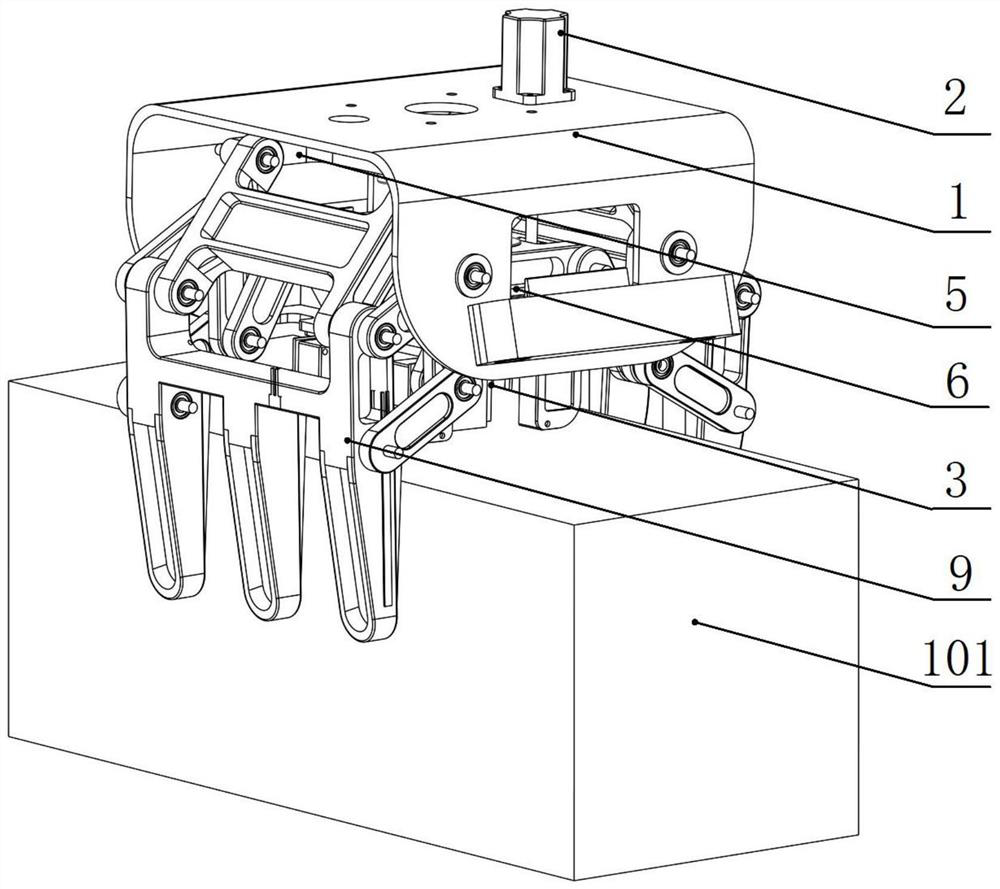
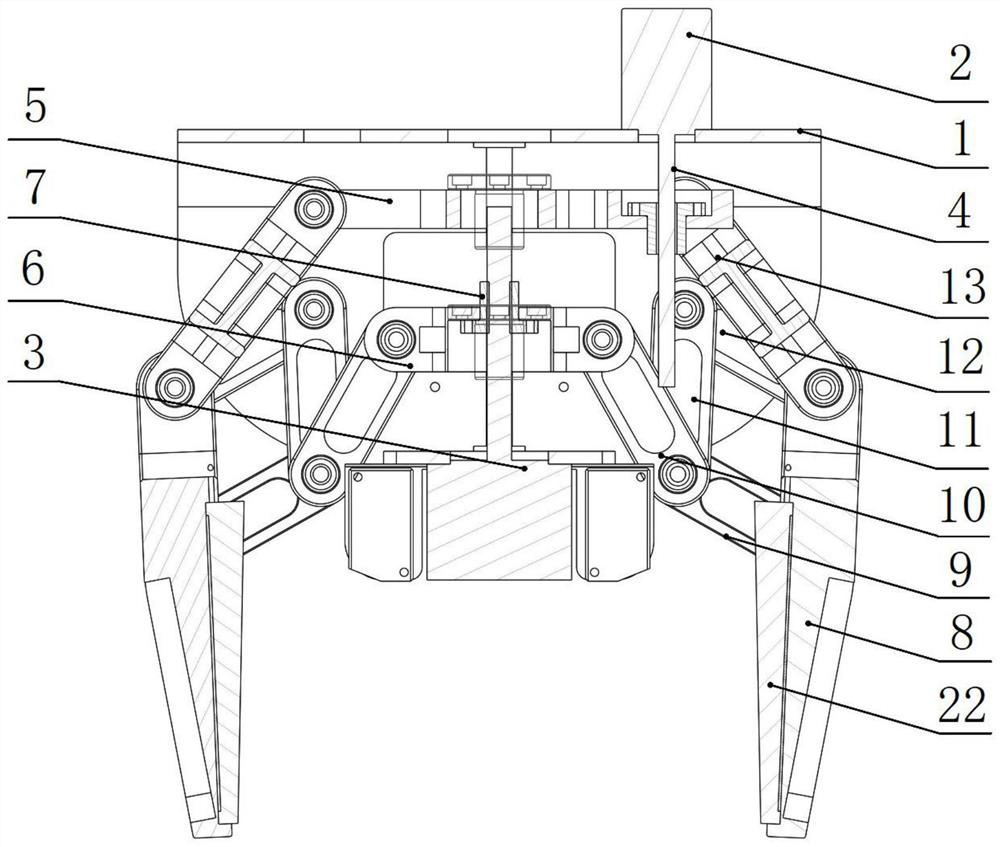
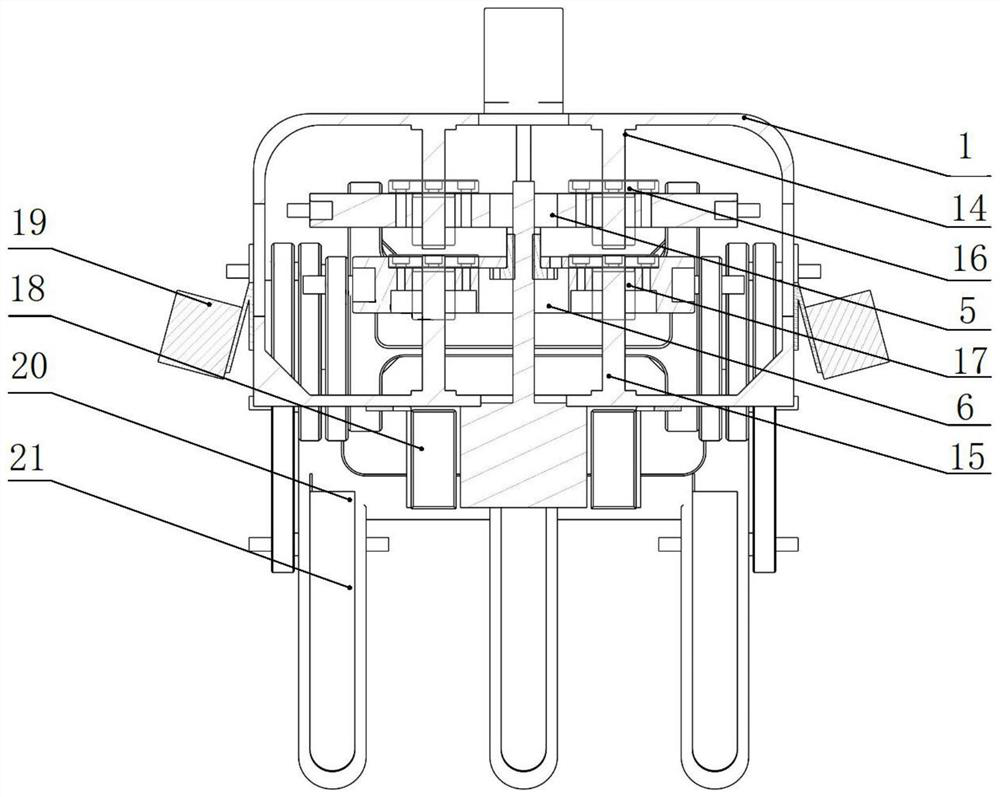
[0020] according to figure 1 , 2 , 3, and 4, this embodiment proposes a large-stroke clamping mechanism with adaptive brick scale, including a main bearing frame 1, and one side of the main bearing frame 1 is provided with a lateral rigidity maintaining mechanism, And the upper and lower sides of the main bearing frame 1 are respectively equipped with an upper drive motor 2 and a lower drive motor 3, the output end of the upper drive motor 2 is equipped with an upper screw module 4 through a coupling, and the upper screw module On the group 4, an upper platform 5 is rotated and installed, and the upper platform 5 is located on the inner side of the main bearing frame 1. The upper dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More