Anti-interference adaptive dynamic planning method for CACC system
A dynamic programming and self-adaptive technology, applied in control/regulation systems, motor vehicles, non-electric variable control, etc., can solve problems such as not being able to capture the dynamic characteristics of vehicles well
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0089]The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
[0090] The heterogeneous fleet model provided in this example considers actuator faults and external disturbances comprehensively, adopts a data-driven ADP algorithm, and designs a cooperative controller, which can enable the fleet to achieve convergence of each vehicle during the entire braking process. And realize the queue stability of the entire fleet.
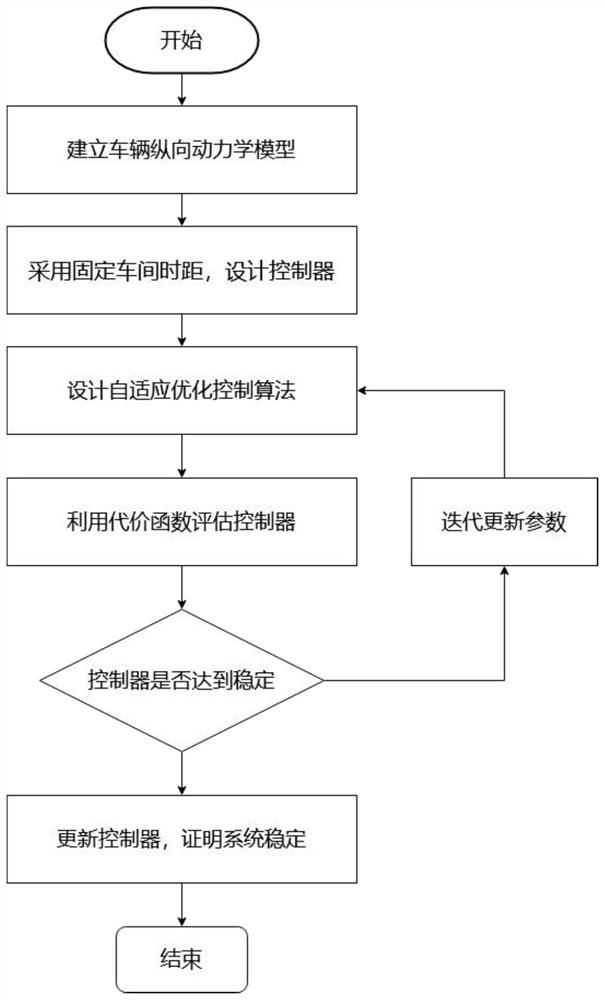
[0091] An adaptive dynamic programming method for an anti-jamming CACC system, such as figure 1 shown, including the following steps:
[0092] Step 1. According to the dynamic performance of the vehicle, construct a fixed time interval strategy, adopt a one-way communication structure, and establish a longitudinal dy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



