

Point cloud collision detection method applied to robot grabbing scene
A collision detection and robot technology, applied in the field of robot vision, which can solve problems such as unstable grasping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
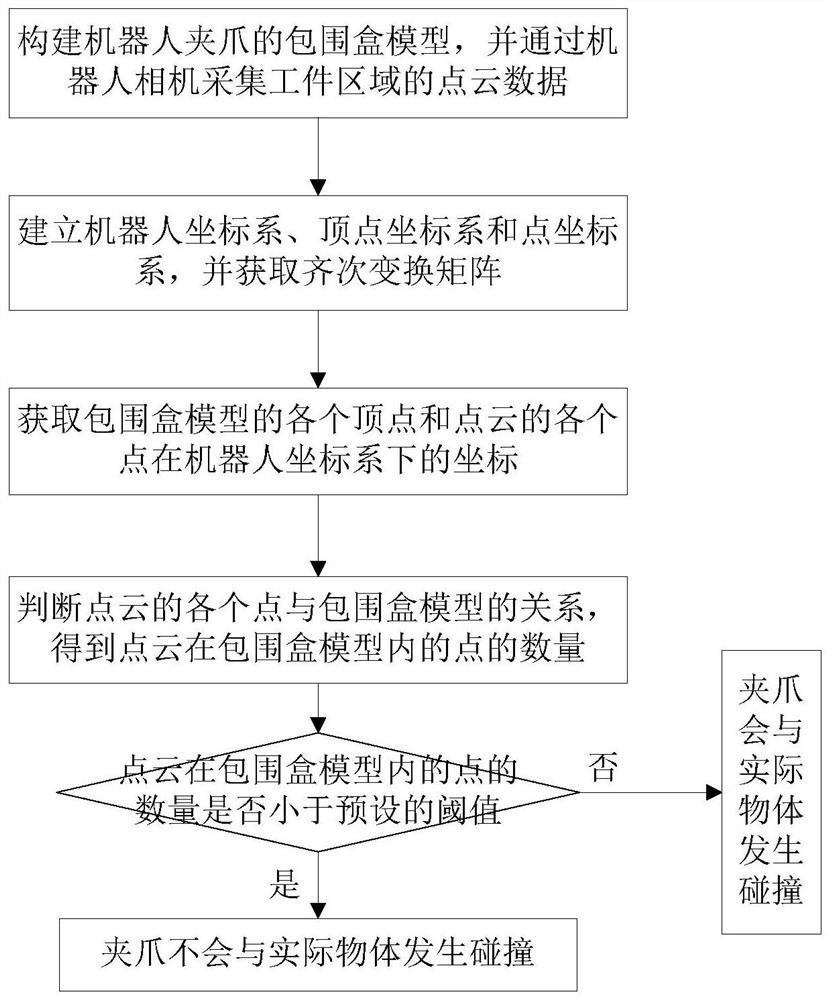
[0071] like figure 1 As shown, a point cloud collision detection method for robot grabbing scene, including the following steps:
[0072] S1: Construct the bounding box model of the robot gripper, and collect the point cloud data of the workpiece area through the robot camera;
[0073] S2: Establish the robot coordinate system, the vertex coordinate system of each vertex of the bounding box model and the point coordinate system of each point in the point cloud, and obtain the homogeneous transformation matrix of each vertex coordinate system and each point coordinate system in the robot coordinate system;
[0074] S3: Obtain the coordinates of each vertex of the bounding box model and each point of the point cloud in the robot coordinate system according to the homogeneous transformation matrix;
[0075] S4: According to the coordinates of each vertex of the bounding box model and each point of the point cloud in the robot coordinate system, judge the relationship between eac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More