High-precision three-dimensional map and two-dimensional grid map synchronous construction method
A technology of three-dimensional map and grid map, applied in the field of robotics, can solve the problems of time discount for drawing maps, limited information of two-dimensional grid map, collision with robot chassis, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
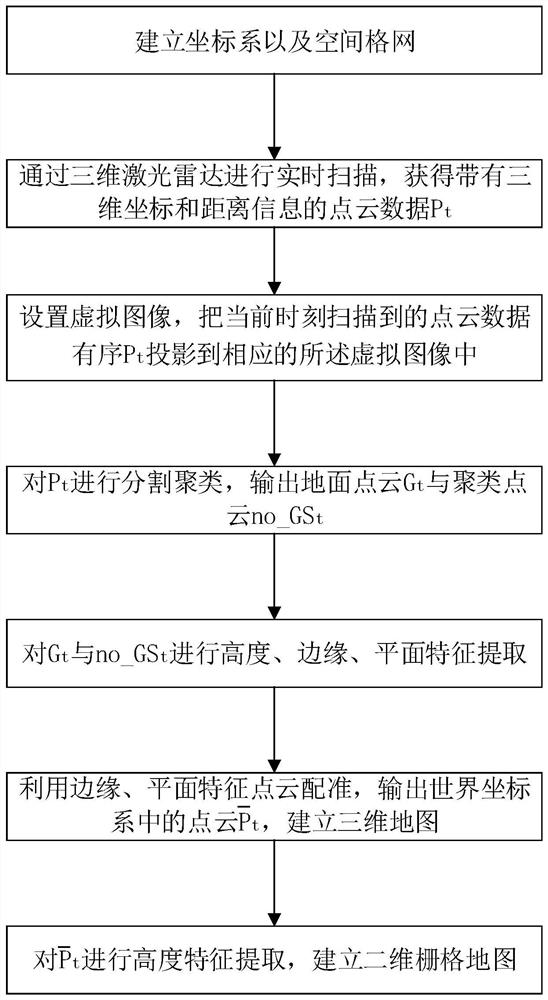
[0082] figure 1 A flow chart showing a method for synchronously constructing a high-precision three-dimensional map and a two-dimensional grid map according to an embodiment of the present invention, please refer to figure 1 , the implementation steps of a method for synchronously constructing a high-precision three-dimensional map and a two-dimensional grid map proposed by the present invention are as follows:
[0083] A coordinate system and a spatial grid are established, and the coordinate system includes a world coordinate system and a lidar coordinate system.
[0084] Install and fix the 16-line three-dimensional laser radar on the navigation robot, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More