

Seven-degree-of-freedom mechanical arm limiting optimization method based on position-level inverse kinematics
A technology of inverse kinematics and optimization methods, which is applied to manipulators, program-controlled manipulators, and manufacturing tools. It can solve problems such as end-state self-motion, numerical solutions that cannot obtain closed solutions, and limitations on the flexibility of manipulators to ensure consistency. performance, optimization of joint range of motion, and avoidance of end-state self-motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0054] Specific Embodiment 1: A position-level inverse kinematics-based seven-degree-of-freedom mechanical arm limit optimization method in this embodiment includes the following steps:
[0055] Step 1: Obtain the analytical solution of the inverse kinematics of the seven-degree-of-freedom manipulator based on the parametric solution of a fixed joint angle;
[0056] Step 2: take the fixed joint angle parameter as input, and the joint limit as an optimization index, and establish an optimal control problem;
[0057] Step 3: Transform the constrained problem into an unconstrained problem based on the Lagrange multiplier method;
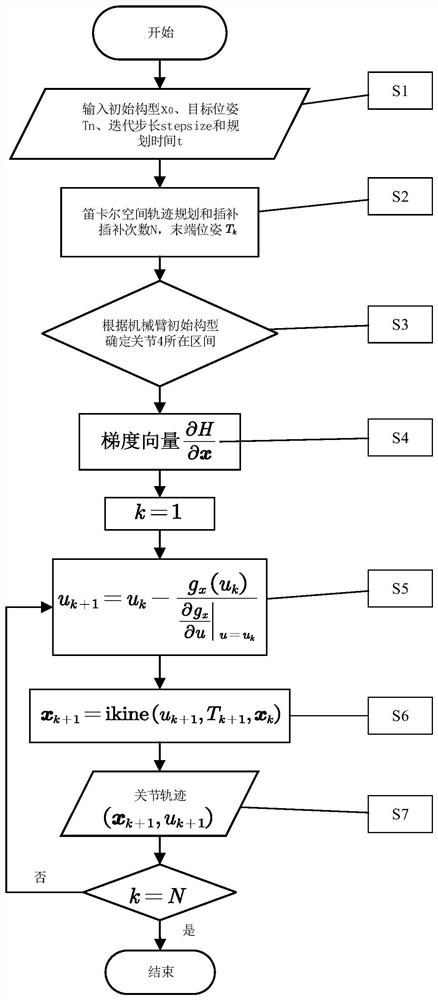
[0058] Step 4: Realize the solution to the optimal joint angle parameters based on the Newton iterative method;
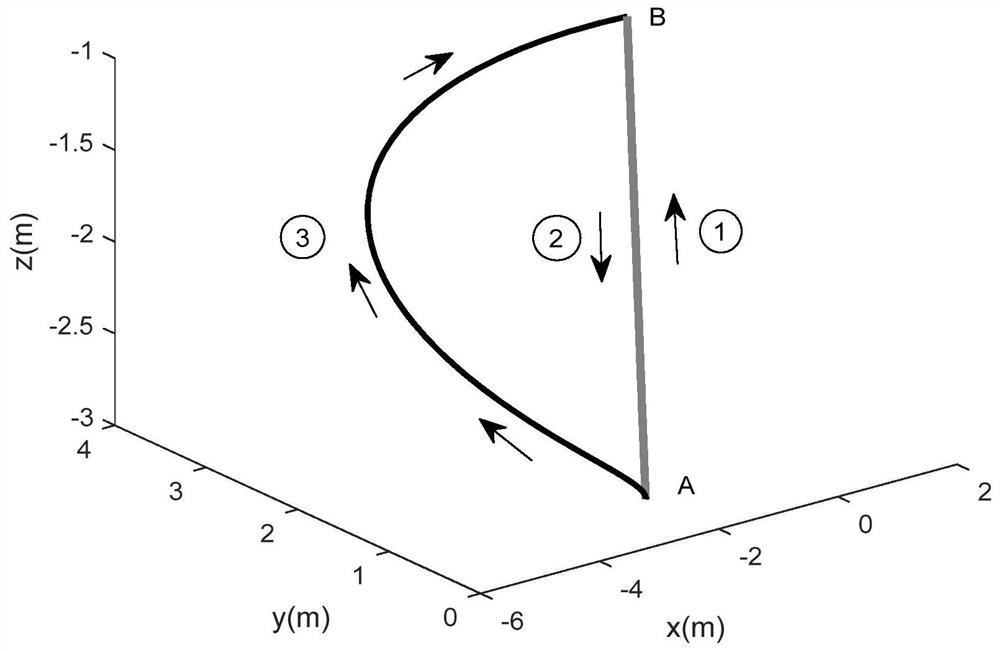
[0059] Step 5: By giving the initial configuration, expected end pose and Cartesian path planning, seven joint space trajectories considering joint limit optimization are obtained.
[0060] The present invention aims at optimizing the para...
specific Embodiment approach 2
[0061] Specific implementation mode two: step one of this embodiment mode comprises the following steps:
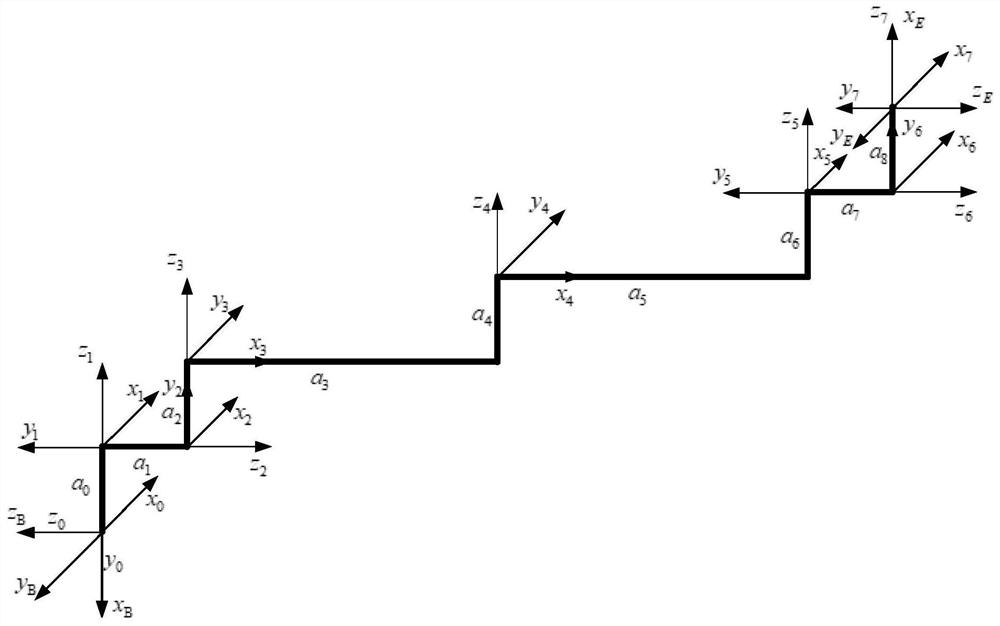
[0062] Step 11: For the 7DOF manipulator joint θ i (i=1, 2...7), fix a certain joint u, and regard it as a six-degree-of-freedom robotic arm. The positive kinematic relationship of the robotic arm can be expressed as:
[0063] f(x,u)=T (1)
[0064] Among them, x is the remaining joints except the joint u, T is the desired pose, which is a constant value when solving;
[0065] Step 1 and 2: Based on the joint angle parameterization method, the analytical solution of inverse kinematics is solved, and the corresponding position-level inverse kinematics is expressed as:
[0066] x=ikine(u, T, x 0 ) (2)
[0067] where x 0 is the initial configuration of the robot arm. In the motion space of the manipulator, regardless of the singular position of the manipulator, each corresponding to a fixed joint angle u and the corresponding end pose T, there is a set of corresponding ...
specific Embodiment approach 3
[0068] Specific implementation mode 3: Step 2 of this implementation mode considers the joint limit optimization criterion when establishing the optimal control problem. For each joint angle θ, the objective function that needs to be satisfied is:
[0069]
[0070] Among them, θ imax and θ imin are the upper and lower limits of the motion range of the i-th joint, respectively, formula (1) and formula (3) form the inverse kinematics solution problem of the seven-degree-of-freedom manipulator considering the joint limit optimization. The goal of optimization is to minimize H, and this optimization index keeps the joint motion of the manipulator away from the limit position. Other compositions and connections are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More