

Robot pose determination method and device, robot and storage medium
A determination method, robot technology, applied in the field of robotics, to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
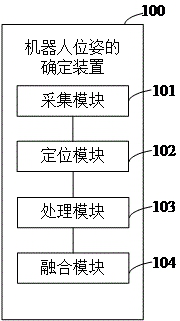
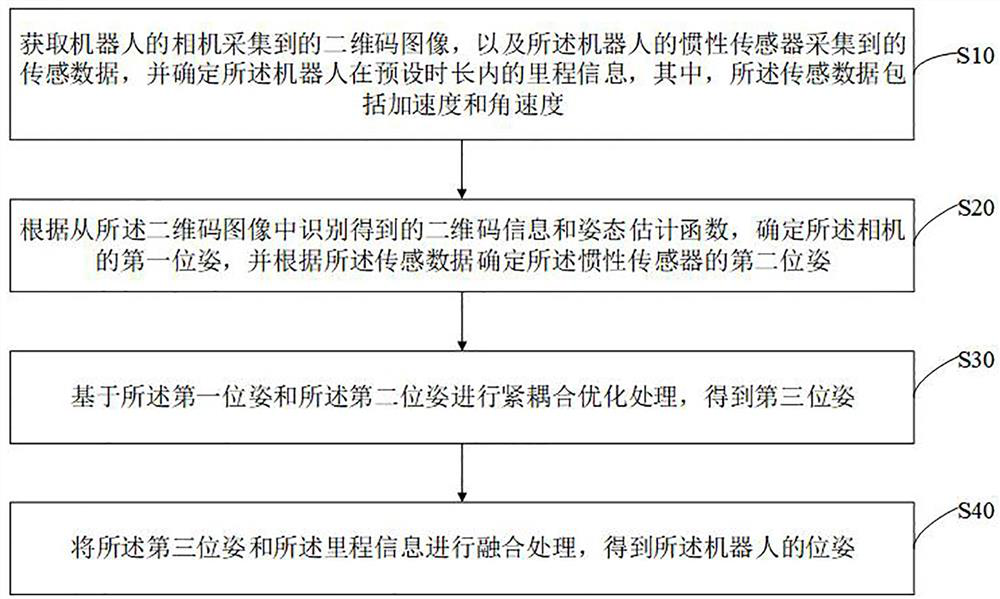
[0043] refer to figure 1 , in one embodiment, the method for determining the pose of the robot includes:
[0044] Step S10, acquire the two-dimensional code image collected by the camera of the robot, and the sensing data collected by the inertial sensor of the robot, and determine the mileage information of the robot within a preset period of time, wherein the sensing data Including acceleration and angular velocity;
[0045] Step S20. Determine the first pose of the camera according to the two-dimensional code information recognized from the two-dimensional code image ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More