

Ground target positioning method and system based on monocular vision of unmanned aerial vehicle
A ground target and UAV technology, applied in the field of ground target positioning based on UAV monocular vision, to achieve the effect of improving usability and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
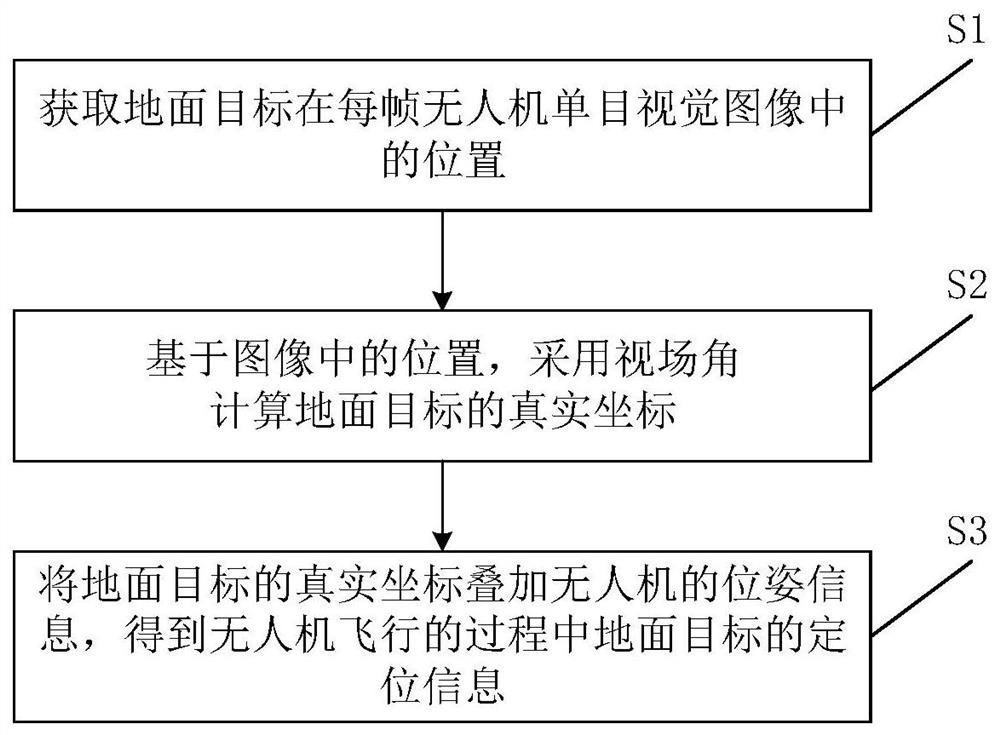
[0052] A schematic flow chart of a ground target positioning method based on unmanned aerial vehicle monocular vision provided by the present invention is as follows figure 1 shown, including:
[0053] S1: Obtain the position of the ground target in each frame of the UAV monocular vision image;
[0054] S2: Based on the position in the image, the real coordinates of the ground target are calculated using the field of view;
[0055] S3: Superimpose the real coordinates of the ground target on the pose information of the UAV to obtain the positioning information of the ground target during the flight of the UAV.
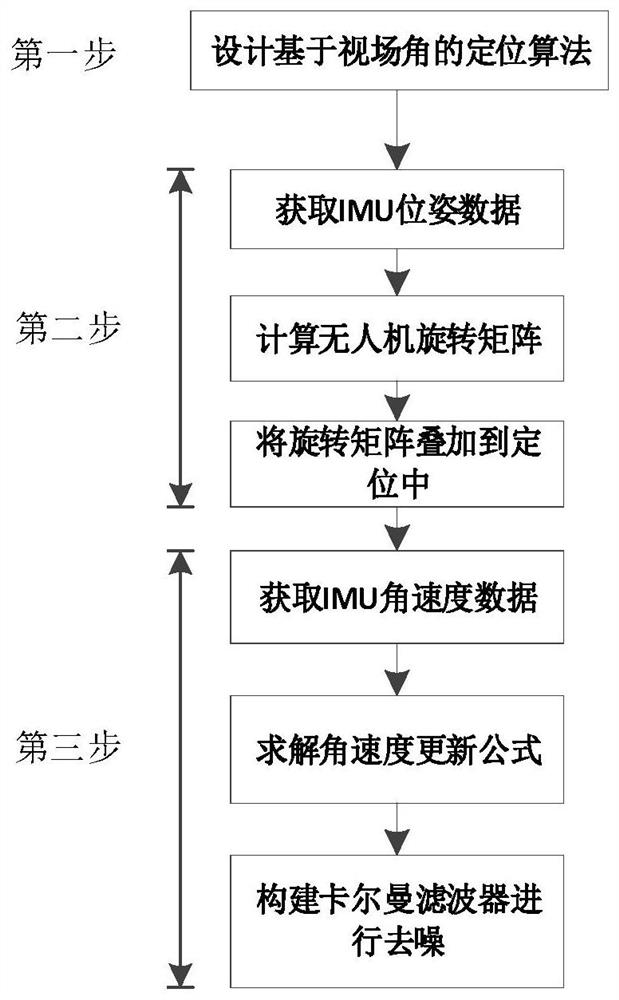
[0056] The specific technical scheme of the present invention is as figure 2 shown, including:
[0057] The first step is to realize the camera-based field of view (FOV) ground target positioning algorithm, and calculate the real coordinates of the ground target during the flight of the drone.
[0058] The specific method is:
[0059] 1.1 Set up the world coordin...
Embodiment 2
[0112] Another embodiment of a ground target positioning method based on unmanned aerial vehicle monocular vision is given below.
[0113] This embodiment comprises the following steps:
[0114] Step a1, get the position of the target in each frame of image. After the drone takes off, the camera is turned on, and the ground target is in place, the target position is initialized by manually framing the target or the target detection algorithm, and the target tracking method is used to continuously obtain the position of the target in the image. Manually frame the target means that after the camera captures the target, use the method of manually drawing a rectangular frame to frame the target on the frame of image containing the target, and initialize the position of the target in the image; using the target detection algorithm means that when the camera captures the target After that, the detection algorithm will automatically detect the target and use a rectangular frame to f...
Embodiment 3
[0155] Based on the same inventive concept, the present invention also provides a ground target positioning system based on unmanned aerial vehicle monocular vision, because the principle of these devices to solve technical problems is similar to the ground target positioning method based on unmanned aerial vehicle monocular vision, repeat I won't repeat them here.
[0156] The basic structure of the system is as Figure 4 As shown, including: position acquisition module, coordinate calculation module and positioning module;
[0157] The position acquisition module is used to obtain the position of the ground target in each frame of the drone's monocular vision image;
[0158] The coordinate calculation module is used to calculate the real coordinates of the ground target by using the field of view angle based on the position in the image;
[0159] The positioning module is used to superimpose the real coordinates of the ground target on the pose information of the drone to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More