

Vehicle control method based on reinforcement learning control strategy in hybrid fleet
A control strategy, a technology of vehicle control, applied in vehicle position/route/height control, non-electric variable control, control/regulation system, etc., which can solve the problems of easy deviation of results and strong dependence on human factors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
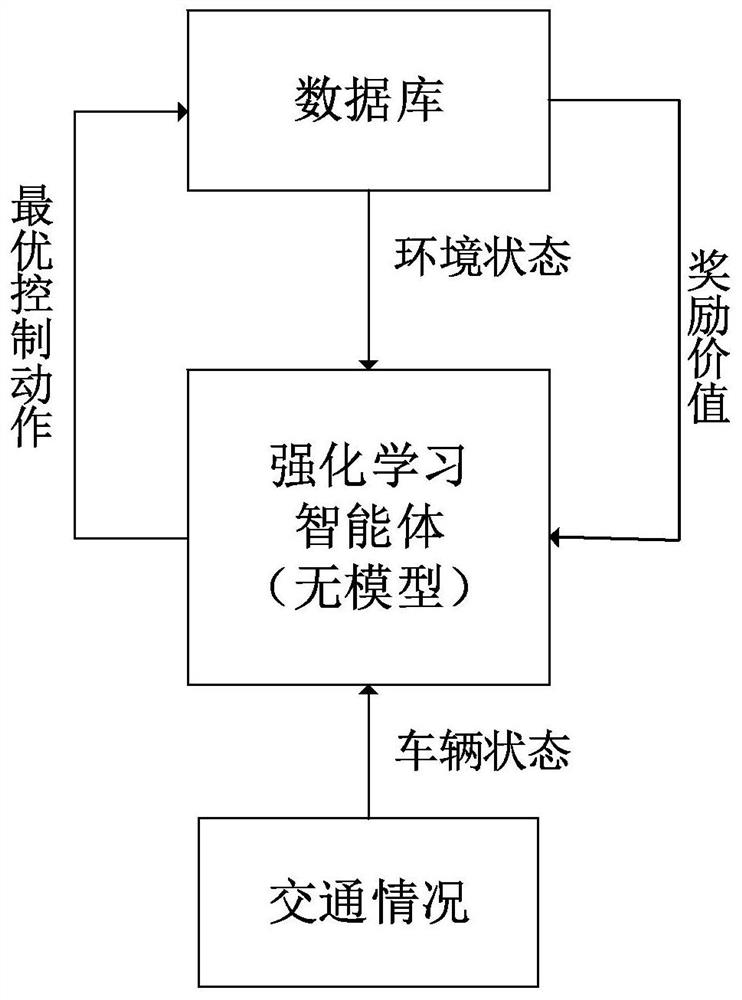
[0066] like figure 1 As shown, in general, the problem of knowing the state transition probability is called "model-based" problem, and the problem of not knowing is called "model-free" problem. The Markov decision process in the prior art is a modeling method proposed for the "no model" problem. The reinforcement learning algorithm of mixed traffic that the present invention proposes is a kind of model-free free control strategy, and this method forms a database with the driving data of vehicles in the mixed fleet, such as speed, acceleration, and driving distance, and combines this database with the traffic on the road. The situation is used as the environment, and each vehicle in the formation is regarded as an agent, and the environment can realize the feedback status and rewards to the agent. The input is the defined environment state, vehicle state, and optimal control action, and the output is the reward value caused by the action in this state. It can be applied to m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More