

Control method and device for bionic jumping action of quadruped robot, electronic equipment and computer readable medium
A quadruped robot, jumping action technology, applied in torque/mechanical power control, non-electric variable control, program-controlled manipulator, etc., can solve problems such as no description
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
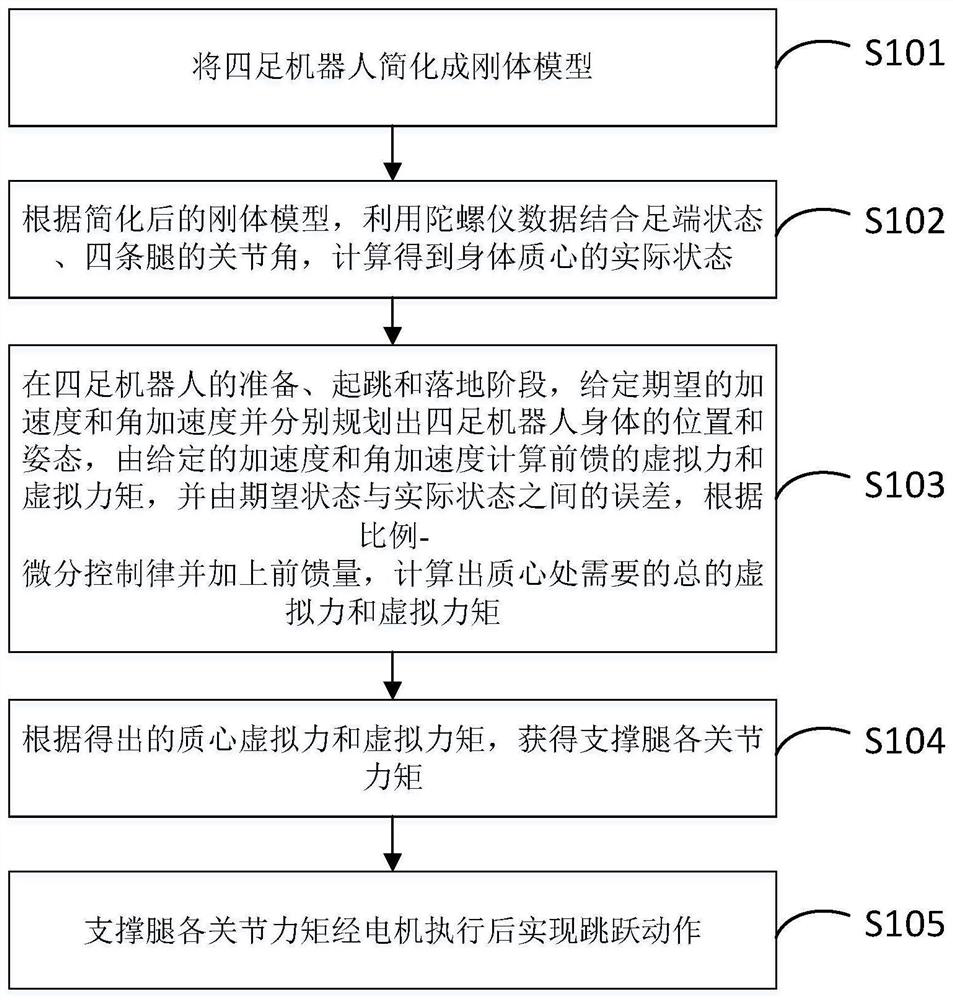
[0029] figure 1 It is a flow chart of a control method for a quadruped robot bionic jump action according to an embodiment of the present invention, as figure 1 As shown, the method includes the following steps:
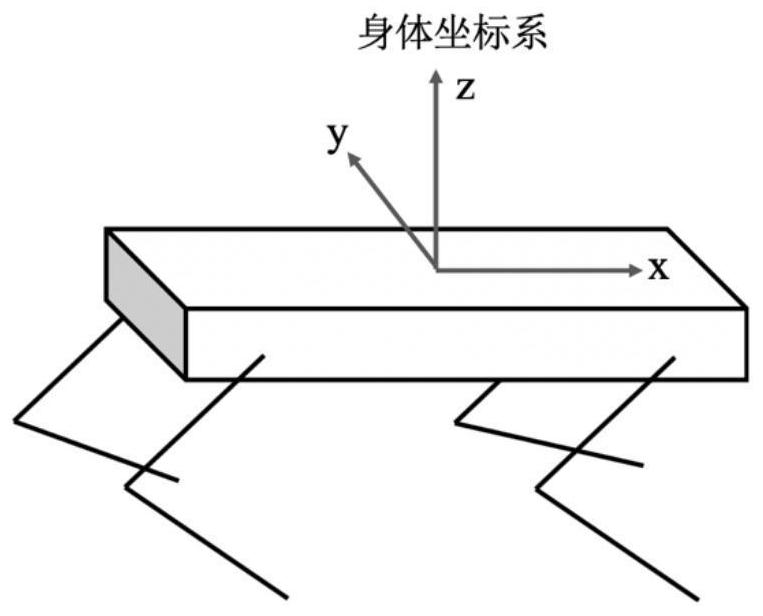
[0030] Step S101, simplifying the quadruped robot into a rigid body model;
[0031] Step S102, according to the simplified rigid body model, using the gyroscope data combined with the state of the feet and the joint angles of the four legs, to calculate the actual state of the body center of mass;
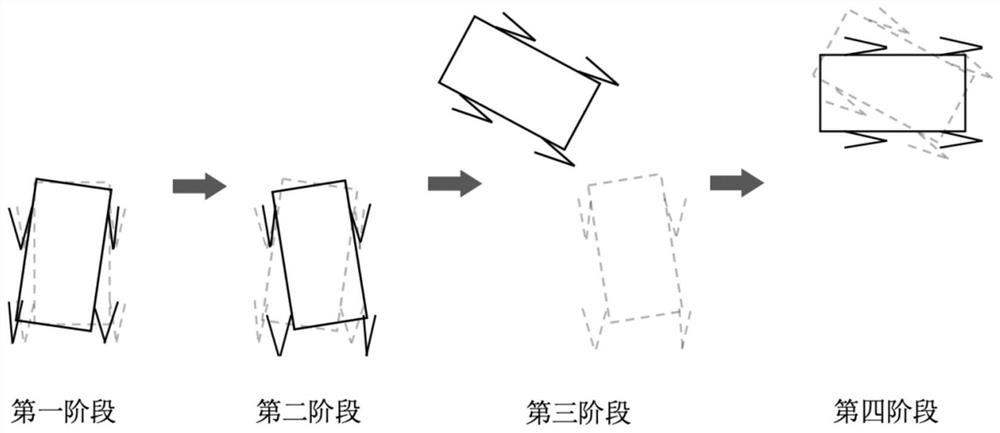
[0032] Step S103, in the preparation, take-off and landing phases of the quadruped robot, given the expected acceleration and angular acceleration and planning the position and posture of the quadruped robot body respectively, the feedforward virtual force is calculated from the given acceleration and angular acceleration and virtual torque, and from the error between the desired state and the actual state, according to the proportional-derivative control law and the fe...
Embodiment 2
[0067] Figure 4 It is a structural schematic diagram of a control device for a bionic jumping action of a quadruped robot provided by an embodiment of the present invention. The device can execute any control method for a bionic jumping action of a quadruped robot provided in any embodiment of the present invention, and has the ability to execute the The corresponding functional modules and beneficial effects of the method. like Figure 4 As shown, the device includes:
[0068] The simplified module 91 is used to simplify the quadruped robot into a rigid body model;
[0069] The first calculation module 92 is used to calculate the actual state of the body center of mass by using the gyroscope data combined with the state of the feet and the joint angles of the four legs according to the simplified rigid body model;
[0070] The second calculation module 93 is used for the preparation, take-off and landing phases of the quadruped robot, given the desired acceleration and an...
Embodiment 3
[0074] An embodiment of the present invention provides an electronic device, including a memory and a processor, the memory stores a computer program that can run on the processor, and it is characterized in that, when the processor executes the computer program, the A control method for the bionic jumping motion of a quadruped robot is described.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More