

An unmanned search and disposal robot system and its working method
A technology for EOD robots and working methods, which is applied in the directions of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of low intelligence level of EOD robots and insufficient precision in performing tasks, and achieves reliable and reliable communication links. Overcome the effects of low robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in further detail below in conjunction with specific examples, but not as a limitation of the present invention.
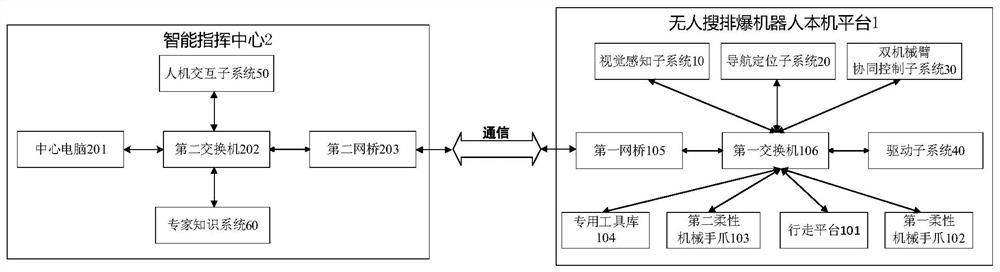
[0050] refer to figure 1 , shows a structural block diagram of an unmanned explosive search and disposal robot system in an embodiment of the present invention. In this embodiment, the unmanned search and disposal robot system includes a local platform 1 of the unmanned search and disposal robot and an intelligent command center 2 .
[0051] The local platform 1 of the unmanned search and detonation robot specifically includes a walking platform 101, a first flexible manipulator 102, a second flexible manipulator 103, a special tool library 104, a first network bridge 105, a first switch 106, and a visual perception subsystem 10. Navigation and positioning subsystem 20 , dual-manipulator cooperative control subsystem 30 and drive subsystem 40 .
[0052] The intelligent command center 2 communicates with the local pl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More