

Plant protection unmanned aerial vehicle real-time navigation line extraction method
A plant protection UAV and extraction method technology, applied in the field of plant protection UAV real-time navigation line extraction, can solve the problems of fruit tree canopy image interruption, fruit tree death, etc., and achieve the effect of overcoming the discontinuity phenomenon
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
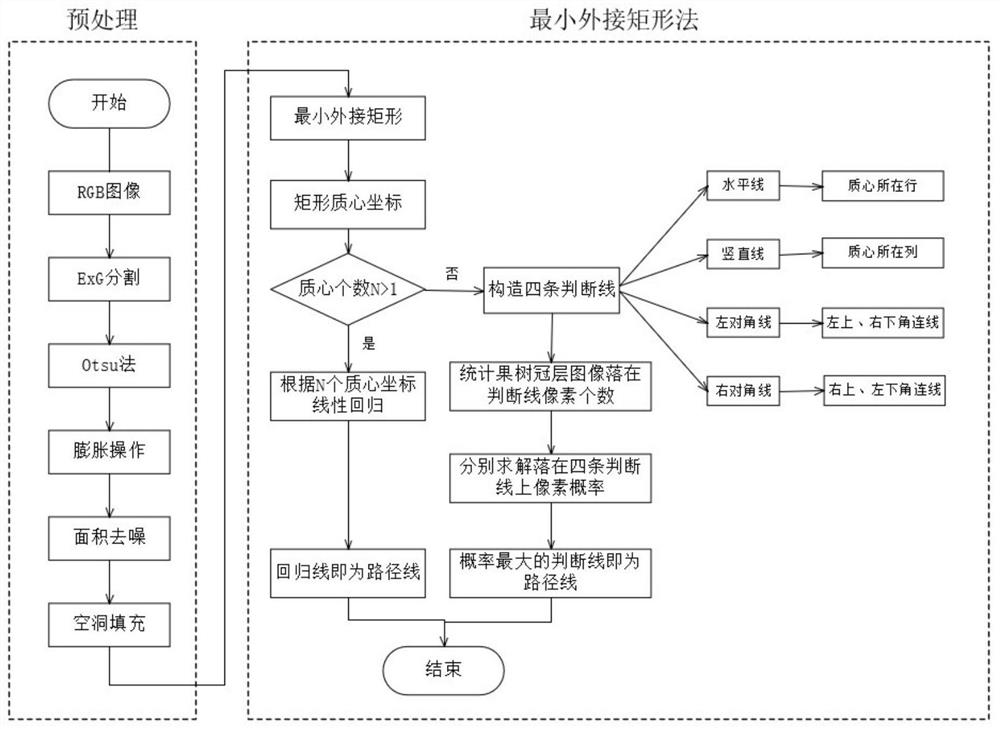
[0054] Such as figure 1 As shown, a real-time navigation line extraction method of a plant protection drone of the present invention, the navigation line is the centerline of the fruit tree canopy, and the method includes the following steps:
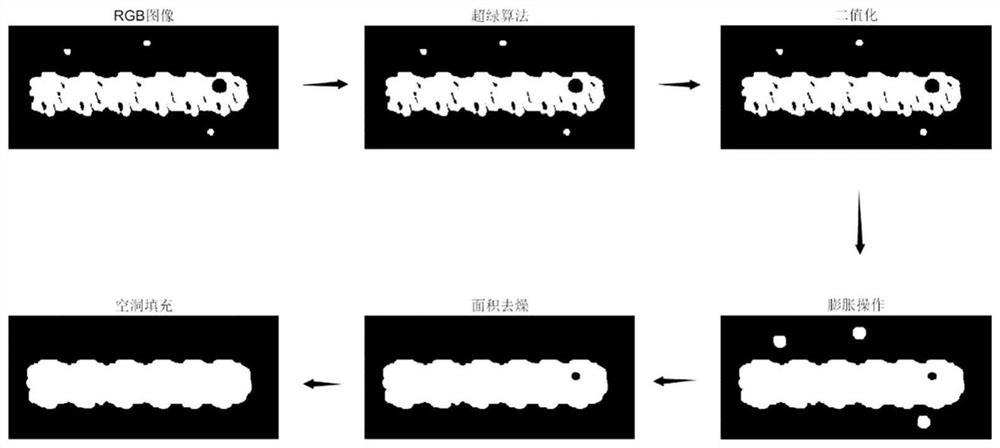
[0055] S1. Preprocessing the RGB image of the fruit tree row taken by the plant protection drone
[0056] Such as figure 2 As shown, the RGB image of the fruit tree row taken by the plant protection UAV is grayed out using the super green algorithm (ExG), ExG=2G-R-B, R represents the red channel, G represents the green channel, and B represents the blue channel; then use The imbinarize(Image,'global') function in MATLAB 2019 software uses the maximum inter-class variance method (Otsu) to binarize the grayscaled image (that is, the image only has 0 and 1) to obtain a binary image; Then use the structural eleme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More