

Attitude control method of underwater robot based on bp neural network s-plane control
A BP neural network, underwater robot technology, applied in attitude control, adaptive control, general control system and other directions, can solve the problem of control parameters relying on manual settings and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
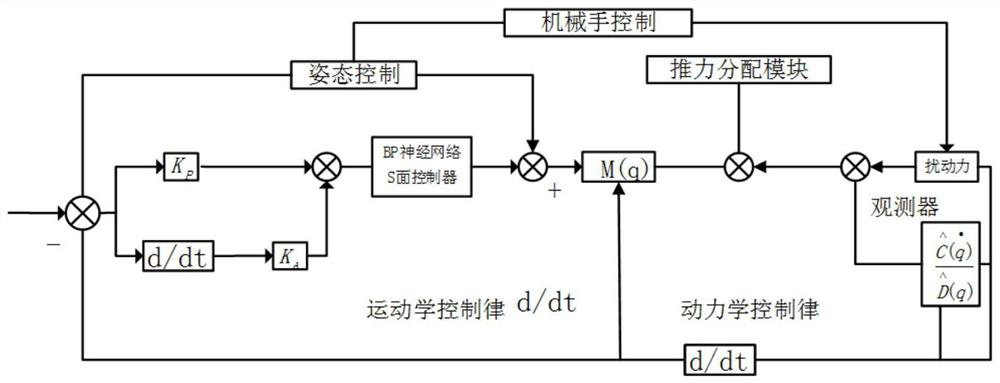
[0029] Such as figure 1 Shown, a kind of underwater robot posture control method based on BP neural network S surface control in the present embodiment comprises the following contents:
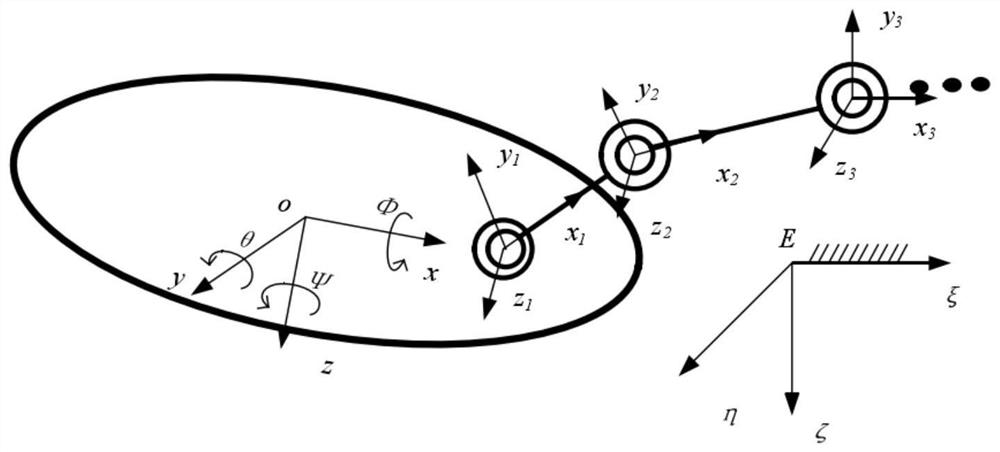
[0030] (1) Construct the body coordinate system and inertial coordinate system of the underwater robot, establish a coordinate system for the umbilical cable of the underwater robot, and establish a link coordinate system for the joints of the underwater robot manipulator using the D-H method;
[0031] (2) Establish the dynamic model of the underwater robot, and analyze and model the disturbance force of the umbilical cable and the manipulator to the underwater robot;
[0032] Such as figure 2 as shown,
[0033] η=[η 1 n 2 ] T is the position and attitude angle of the underwater robot in the motion coordinate system, where η 1 =[x y z] T ,
[0034] v=[v 1 v 2 ] T is the linear velocity and angular velocity of the underwater robot in a fixed coordinate system, v 1 =[u v w] T ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More