

A Single Beacon Localization Method for Underwater Vehicles with Global Convergence
An underwater vehicle and convergence technology, applied in satellite radio beacon positioning systems, instruments, navigation, etc., can solve the problems of initial position error and large position error of underwater vehicles, and achieve the goal of ensuring the convergence of positioning errors Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
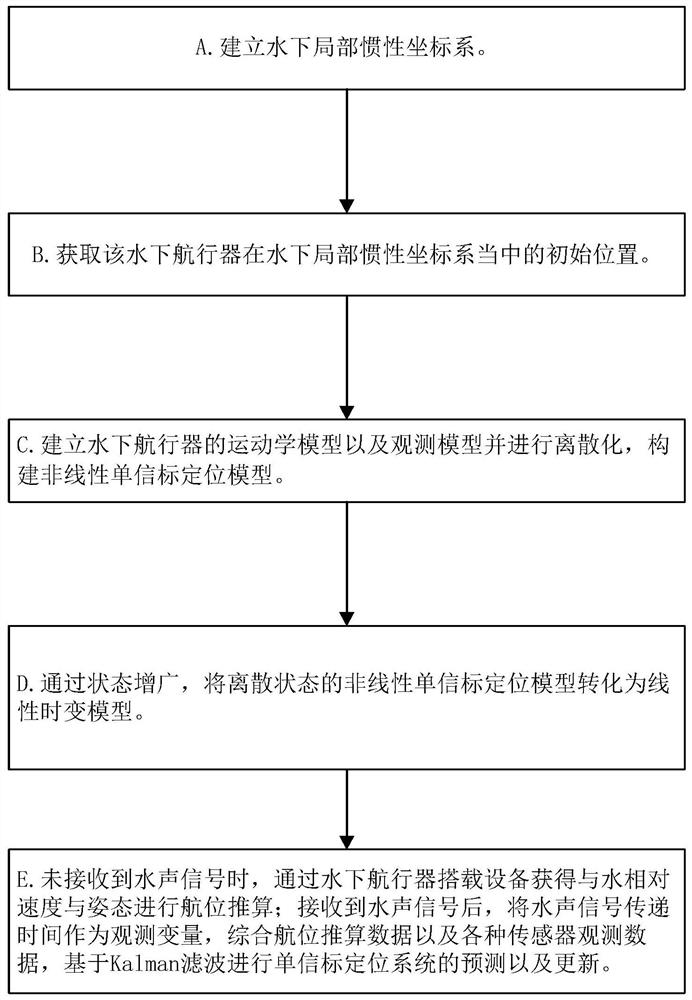
[0145] Embodiment 1, see attached figure 1 , a single-beacon positioning method for underwater vehicles with global convergence. The underwater vehicle is equipped with hydrophones, Doppler velocimeters, depth gauges, attitude and heading reference systems, and GPS; broadcasting an underwater acoustic signal; the method comprising the steps of:
[0146] A. Take any point in the positioning area as the origin, and set the east, north, and sky directions as x, y, and z axes respectively to establish an underwater local inertial coordinate system.
[0147] B. Obtain the initial position of the underwater vehicle in the underwater local inertial coordinate system through the equipped GPS.
[0148] C. Establish and discretize the kinematics model and observation model of the underwater vehicle, and construct a nonlinear single-beacon positioning model.
[0149] The establishment method of the kinematic model is as follows:
[0150] Define the position vector as:
[0151] p=[x y...
Embodiment 2
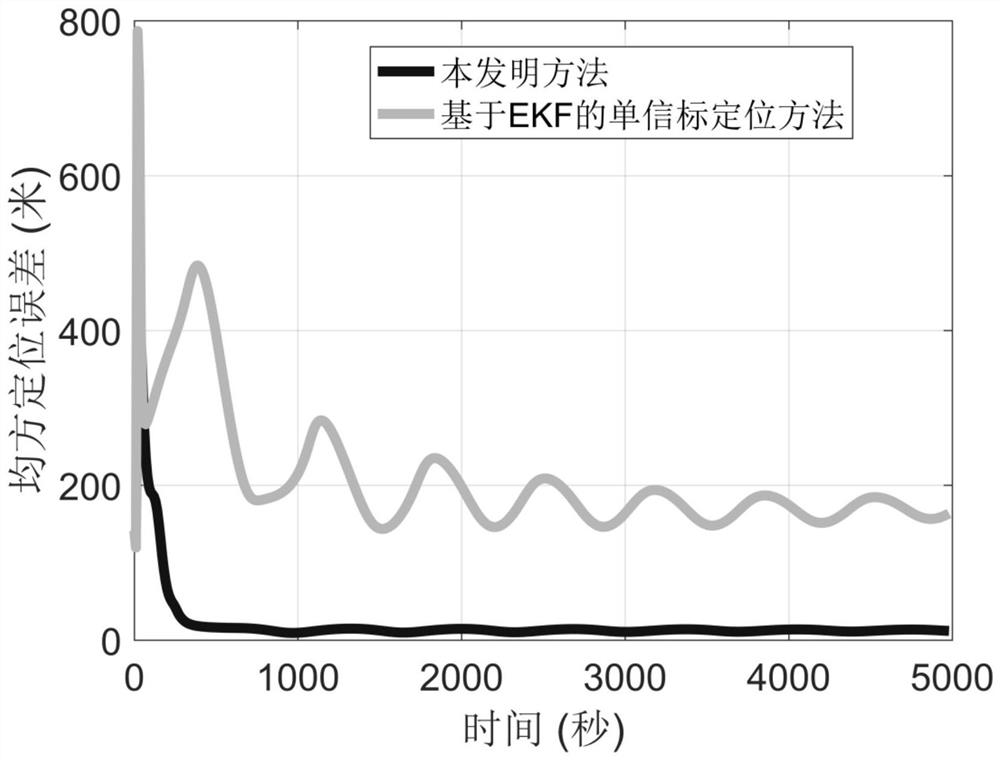
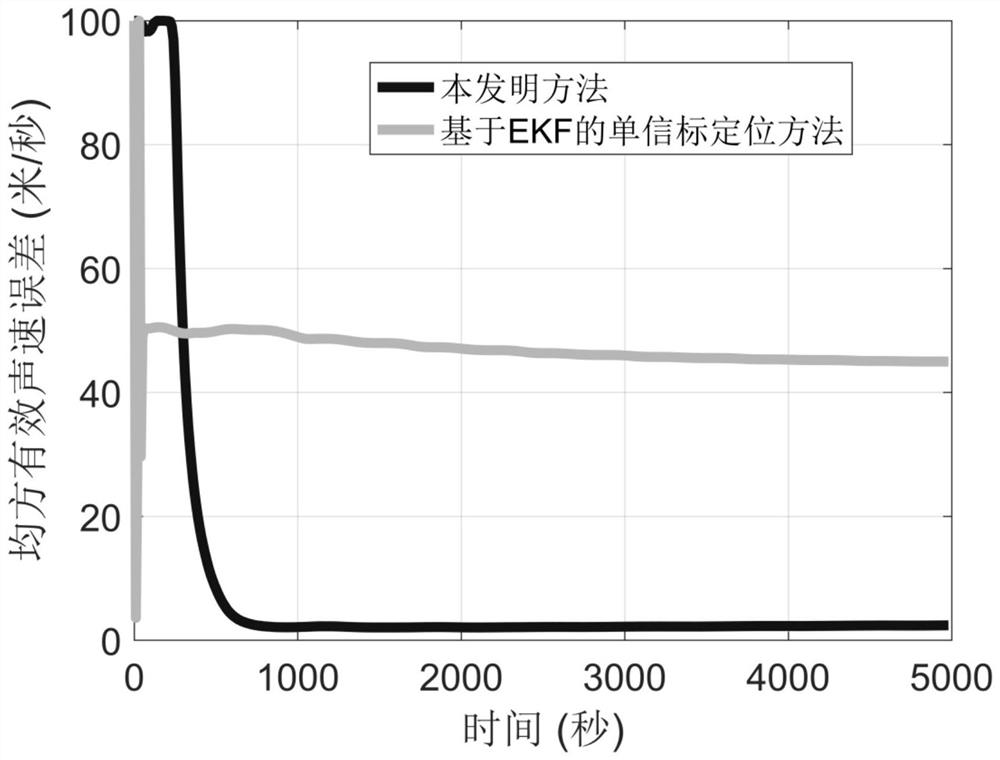
[0281] Embodiment 2, the method described in Embodiment 1 is verified by simulation data.
[0282] As a comparison, this embodiment also shows the positioning results of the traditional underwater single-beacon positioning method based on the extended Kalman filter (EKF) for position calculation. The overall simulation time is 5000 seconds, the effective speed of sound simulated during the whole movement is constant at 1500 m / s, and the ocean current speed in three directions is 0.1 m / s. The simulated underwater acoustic signal transmission period is 10 seconds. Similarly, the ocean current observation period, depth observation period and system discrete period are also 10 seconds. The cycle of dead reckoning is 0.1s (equivalent to 10Hz sampling frequency).
[0283] The simulated sensor noise parameters are as follows
[0284]
[0285] In the process of numerical verification, the initial parameters of the filter are set as follows: (1) the initial position error in both ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More