

Mechanical arm used for controlling distance between bearing pieces
A technology of mechanical arms and receiving parts, which is applied in the manufacture of electrical components, conveyor objects, semiconductor/solid-state devices, etc., which can solve the problems that the spacing cannot be adjusted according to the demand, the production cost increases, and the spacing error, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0067] one,
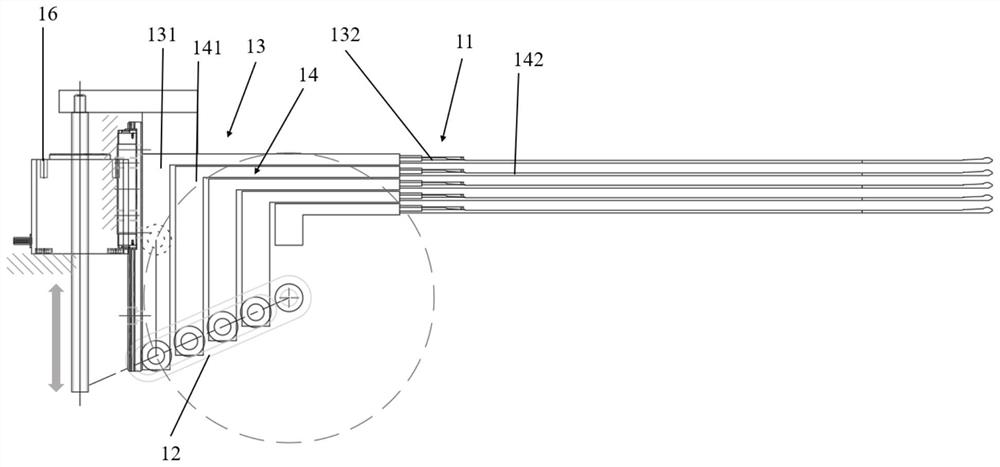
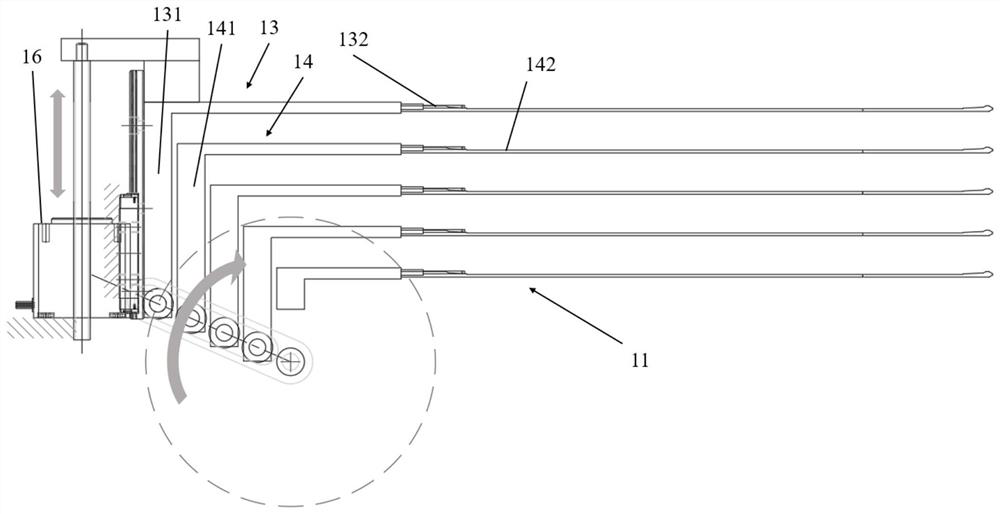
[0068] see Figure 4 , a position detector 5 is further provided, and the position detector 5 can detect the vertical height of the bottom of the first receiving group body 131 from the first groove 111 to obtain a height detection value; The control unit 2 determines whether the servo motor 16 is stopped or not according to the height detection value.
[0069] Therefore, when the first receiving group body 131 moves to a preset height, the control unit 2 will control the servo motor 16 to stop actuating. In this way, the control between the receiving parts 132 and 142 can be achieved. The purpose of the spacing width. Since the width of each distance is affected by the setting positions of the grooves 111, 112, the purpose of controlling the distances can be achieved only by monitoring the position of the first receiving group body 131 in the first groove 111. In addition, during actual implementation, the above-mentioned purpose can also be achieved by monit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More