

A wire-actuated segment capable of decoupling bending motion
A technology of bending motion and structural joints, applied in the field of robotics, can solve problems such as increasing the difficulty of control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
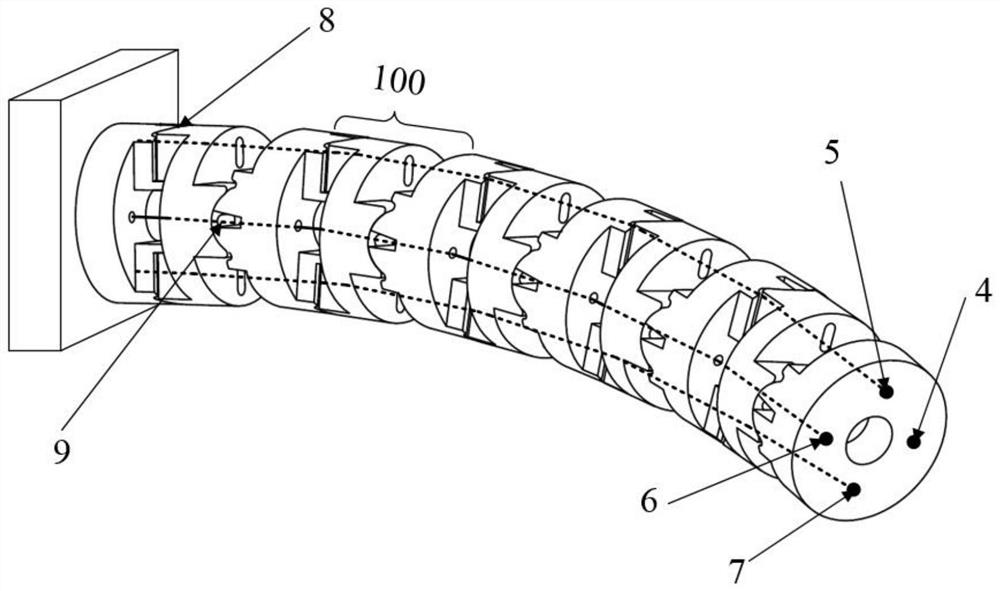
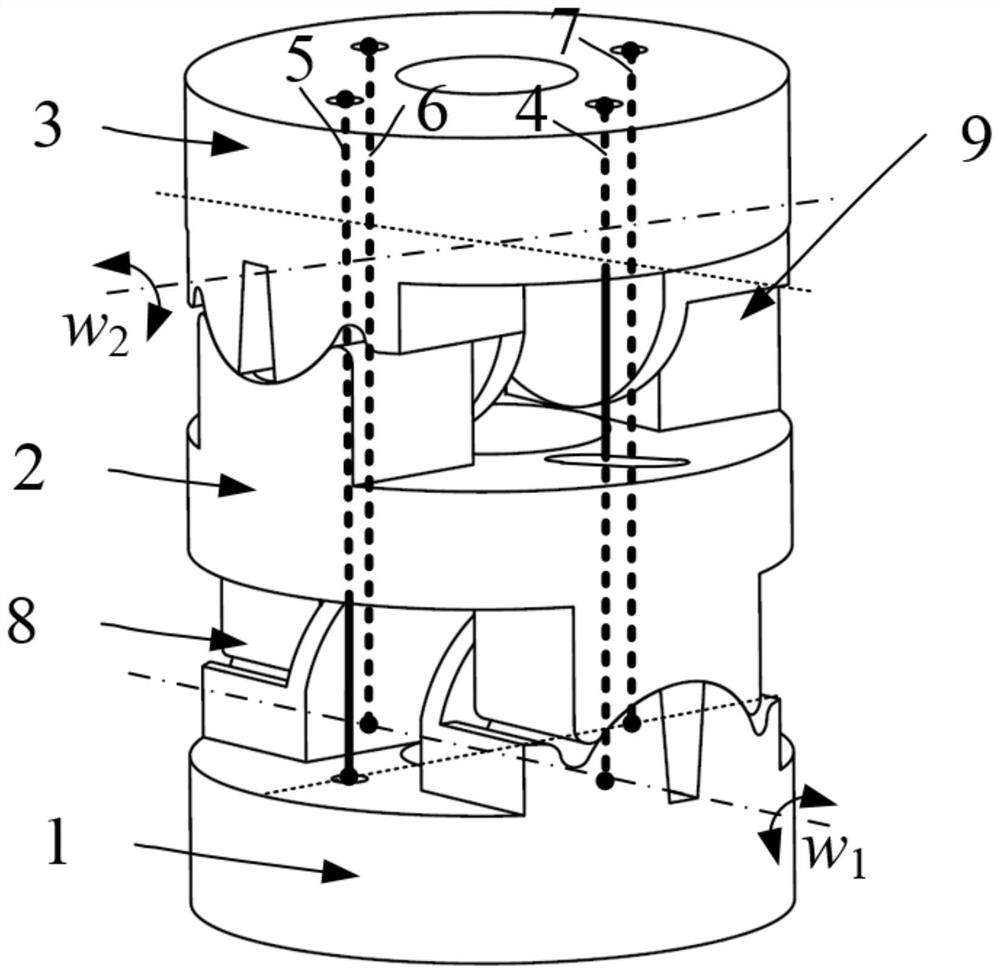
[0034] Such as figure 1 with figure 2 As shown, this embodiment provides a wire-driven joint that can realize decoupling of bending motion, including a plurality of wire-driven joints 100 connected end-to-end, first wires and second wires of each wire-driven joint 100 connected in series; The wire-driven joint 100 includes a base plate 1, a connecting rod 2 and an end plate 3, the base plate 1 is connected with the connecting rod 2 and forms a first rotating pair 8, the rotation axis of the first rotating pair 8 is in line with The end face of the base plate 1 coincides; the end plate 3 is connected with the connecting rod 2 to form a second rotating pair 9, and the rotation axis of the second rotating pair 9 coincides with the end face of the end plate 3; The first wire sequentially passes through each wire-driven joint 100 and drives the second rotating pair 9 to rotate, and the second wire passes through each wire-driven joint 100 sequentially and drives the first rotatin...
Embodiment 2
[0045] Such as figure 1 with figure 2 As shown, this embodiment provides a wire-driven joint that can realize decoupling of bending motion, including a plurality of wire-driven joints 100 connected end-to-end, first wires and second wires of each wire-driven joint 100 connected in series; The wire-driven joint 100 includes a base plate 1, a connecting rod 2 and an end plate 3, the base plate 1 is connected with the connecting rod 2 and forms a first rotating pair 8, the rotation axis of the first rotating pair 8 is in line with The end face of the base plate 1 coincides; the end plate 3 is connected with the connecting rod 2 to form a second rotating pair 9, and the rotation axis of the second rotating pair 9 coincides with the end face of the end plate 3; One end of the first wire is fixedly connected to the end disk 3 at the tail end of the wire driving joint, and the other end passes through the end disk 3, the connecting rod 2, the first rotating pair 8 and the base disk...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More