

Variable range of motion and variable length spine modules
A motion range and spine technology, applied in the field of bionic robots, can solve the problems of high energy consumption, irrespective of the deformation of system components, complex dynamic shape, etc., to achieve the effect of small impact and increased range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
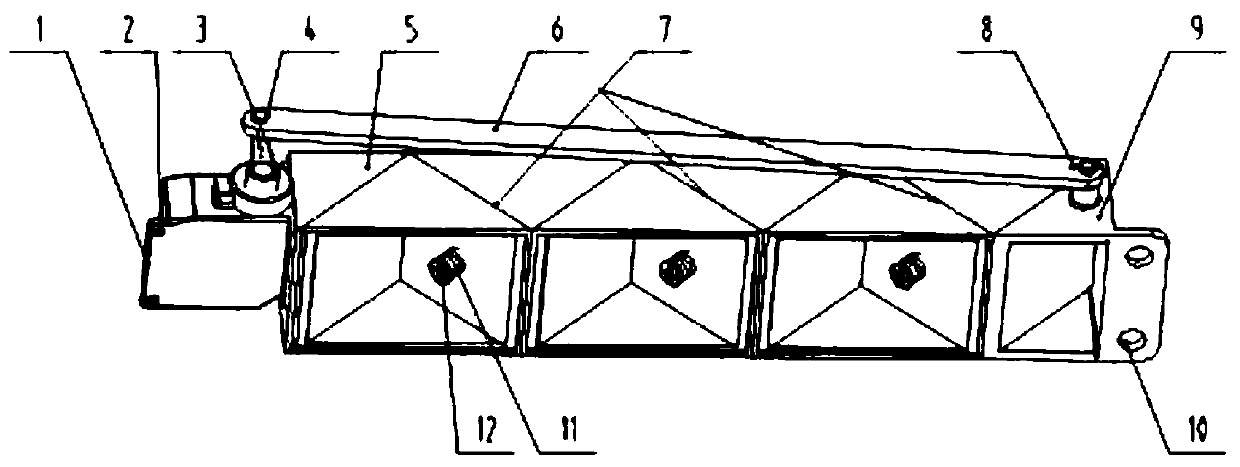
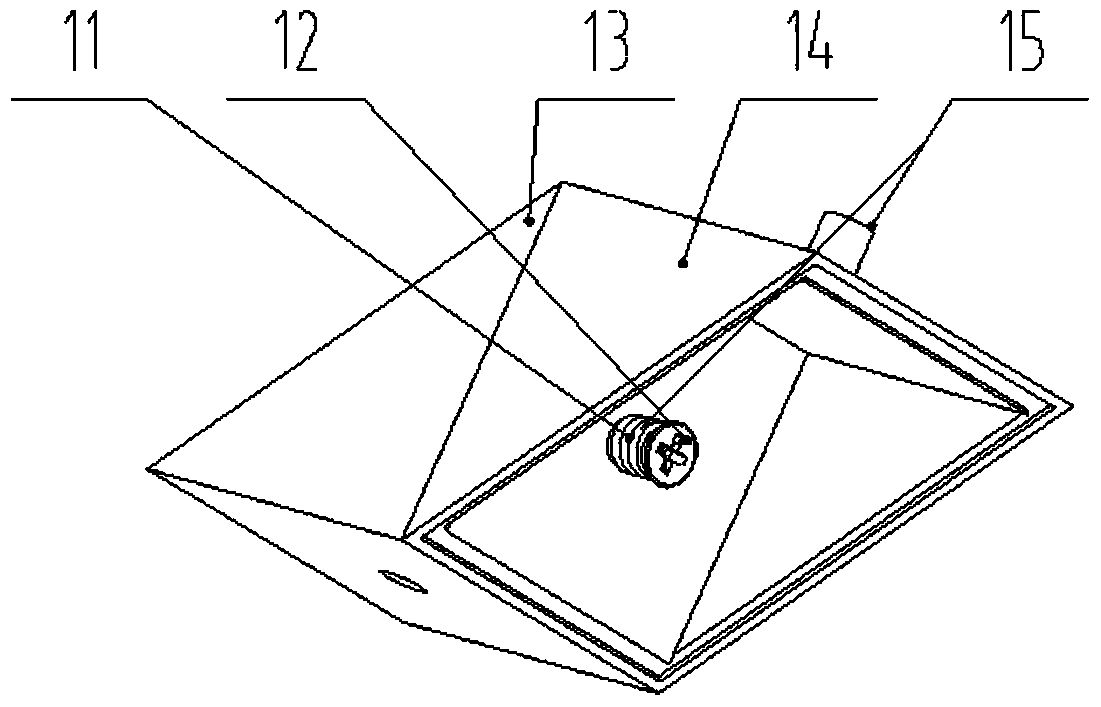
[0012] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0013] combine Figure 1 to Figure 2 , the present invention comprises a steering gear 1, a fixing hole 2, a rudder angle 3, a rotating shaft 4, a spine section 5, a connecting rod 6, a spine module 7, a pin shaft 8, a spine section 2 9, a fixing hole 10, a spring 11, Screw 12, front spinal segment 13, rear spinal segment 14, connecting column 15. Specifically: if figure 1 As shown, there is a fixing hole-2 on one side of the steering gear 1, which can be fixed on the front end of the torso of the quadruped robot, and the other side is fixed on the spine joint-5. One end of the connecting rod 6 is connected with the rudder horn 3 through the rotating shaft 4, and the other end is connected with the second spine joint 9 through the pin shaft 8. The second spine section 9 is fixed on the trunk rear end of the quadruped robot through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More